G系列控制柜配置方法
1.安装系统和环境包
1> 根据文档:
ARCS系统安装教程 (aubo-robotics.cn) 来选择安装22.04 6.1.158 内核版本的系统
2> 安装系统初始化包,选择setup_ubuntu22.04_1.2.1及以上版本
3> 安装系统和初始化包完成后,"reboot" 指令重启工控机
2.配置控制柜
1> 确认内核版本
如下图所示内核显示为6.1.158-rt58

2>执行配置文件
将 G系列控制配置 拷贝到控制柜中,执行脚本后对环境进行配置并会放入ecat_master.conf和aubo_control.conf
# 1.解压zip压缩包
# 2.给脚本权限
chmod +x aubo_magic_g_cb_config.sh
# 3.执行
./aubo_magic_g_cb_config.sh
# 4.执行完成后重启工控机
reboot
# 5.查看/proc/cmdline中的isolcpus是否等于1,2
# 如下图所示

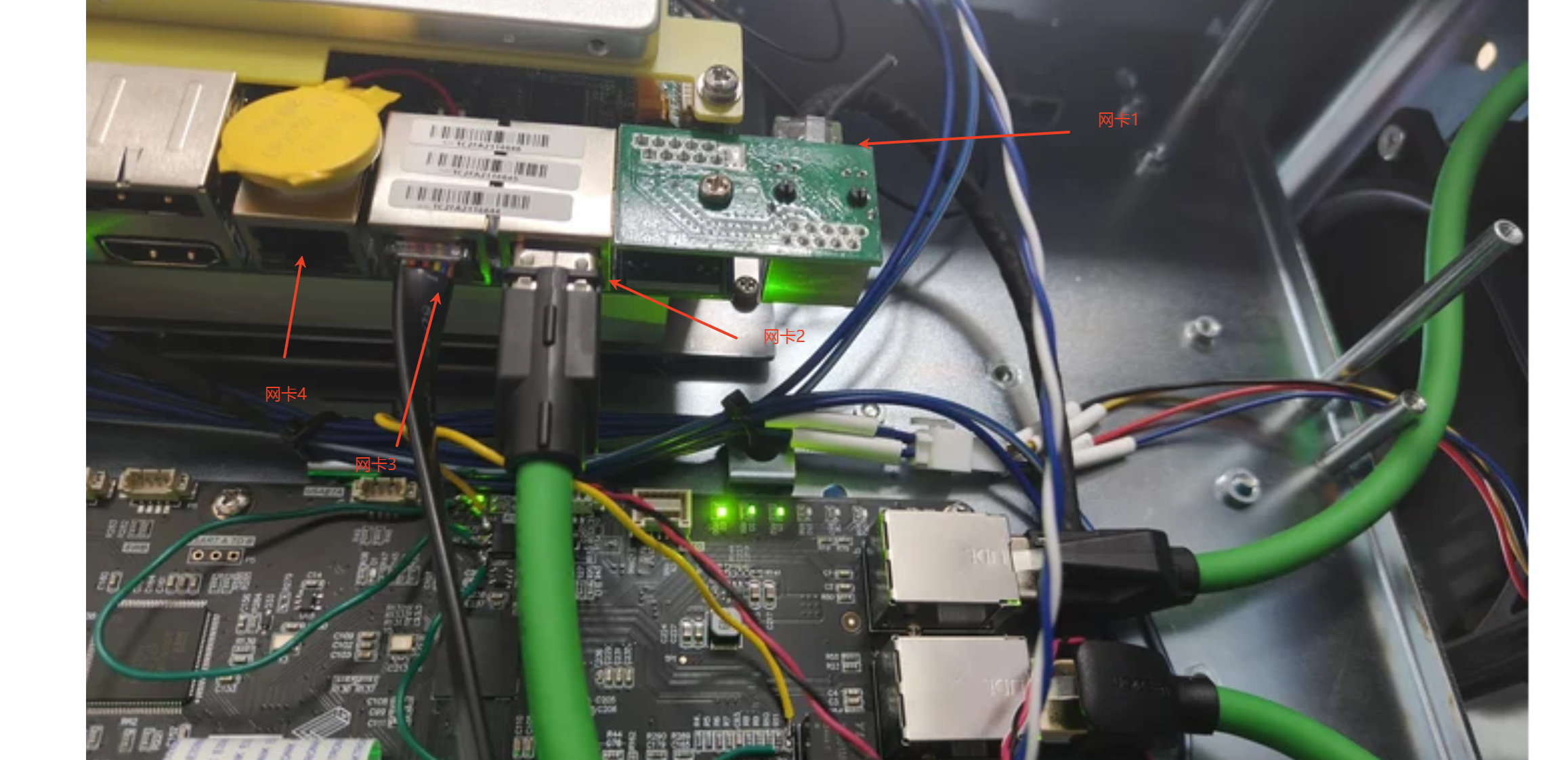
3>网线连接注意事项
使用网卡2将工控机和接口板进行连接
如果有特殊需求,需要修改 "/root/arcs_ws/config/ecat_master.conf" 里面的nic_number=x ,x为实际连接的网卡,注意尽量避免使用网卡1
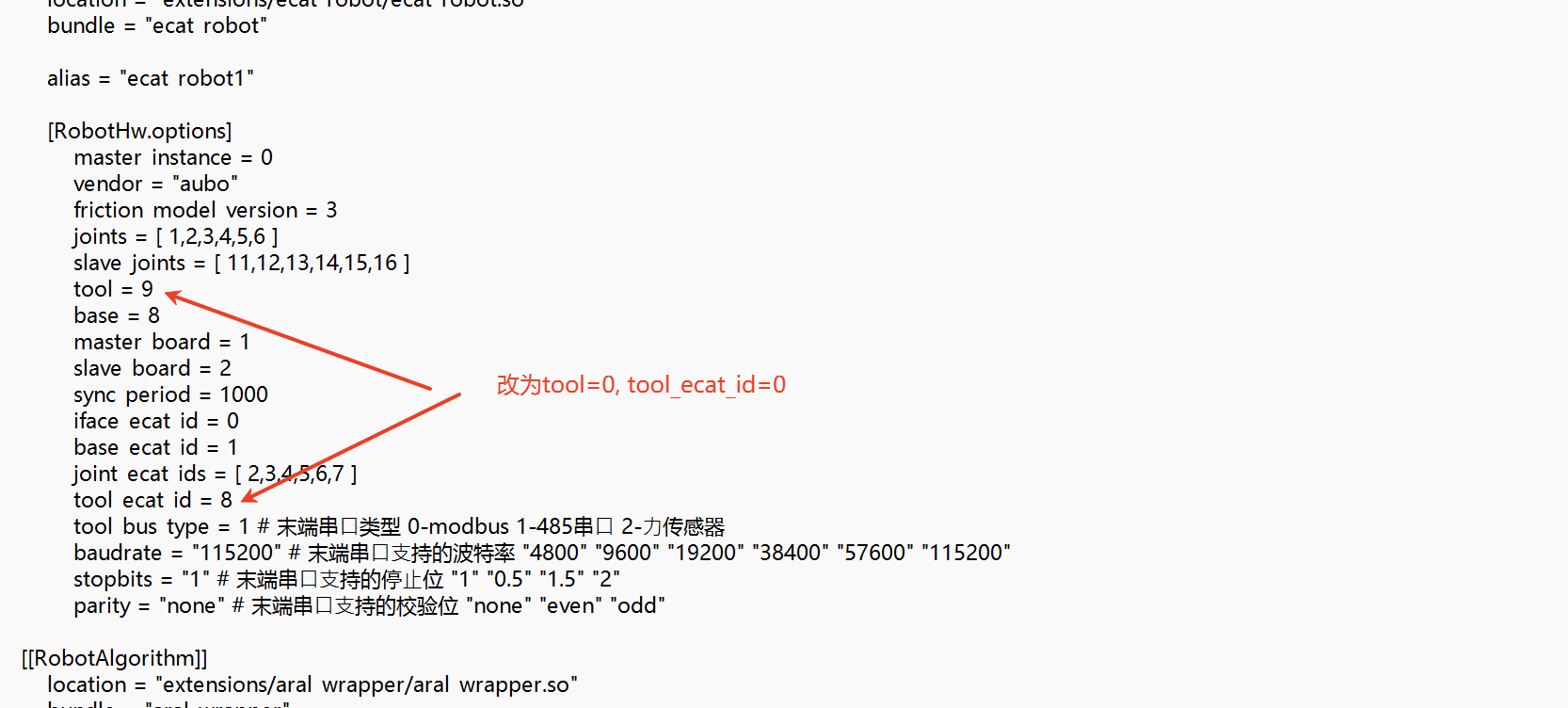
4>配置文件注意事项
如果机械臂没有末端,需要将 "/root/arcs_ws/config/aubo_control.conf" 配置文件中的tool和tool_ecat_id改为 = 0
5>安装arcs版本
安装32.3-alpha.28及以上版本