1>给机械臂上电
2>机械臂上电后静置1分钟
3>拍急停,生成csv文件,csv文件保存在 "/root/arcs_ws/log/.trace"文件夹下,名字为rob1_2026xxxxx.csv,需要查看日期是不是最新生成的
1>打开rob1_2026xxxxx.csv文件,找到sensor_torq1-6的数据,然后选中这6列后生成折线图
2>当数据为1111.1时,说明传感器通讯异常,如下图所示
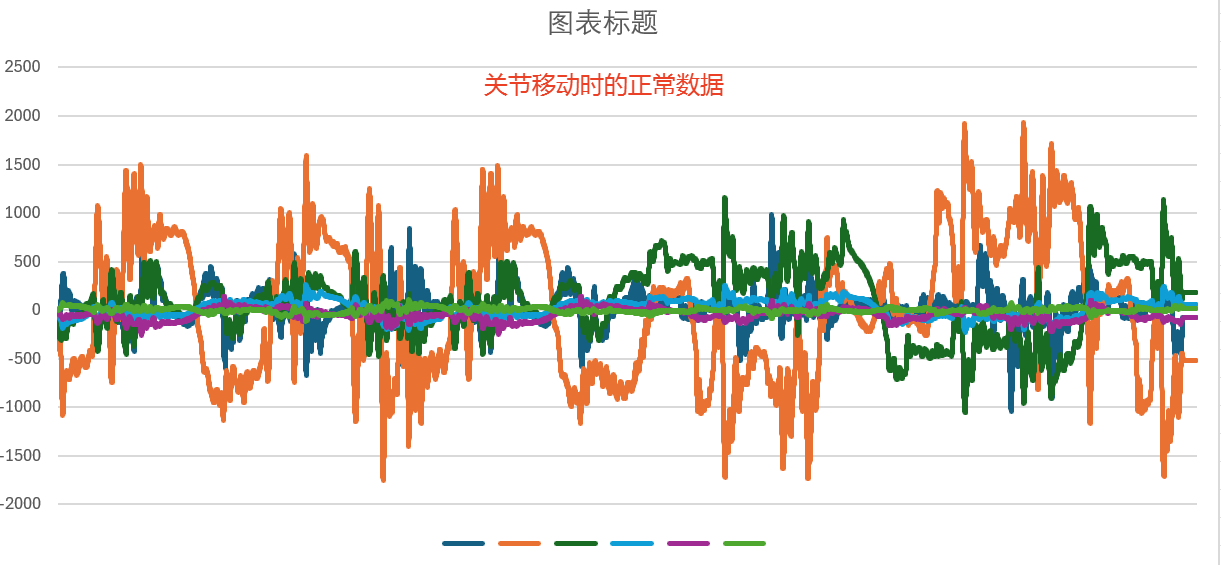
3>正常数据如下图所示