加速度自适应功能出厂测试方案
一、功能概述
加速度自适应作为 0.32 分支新功能,本文旨在验证加速度自适应算法在不同负载、不同路径及不同工况下,能够智能优化运动节拍,同时确保机械臂的轨迹精度、振动指标、能耗指标及长效稳定性符合发布标准。
二、测试准备
在开始测试前,必须确保硬件环境具备功能反馈能力。
验证控制柜 CPU 类型为 J6412。
外接鼠标键盘,终端中执行
lscpu查看控制柜 CPU 类型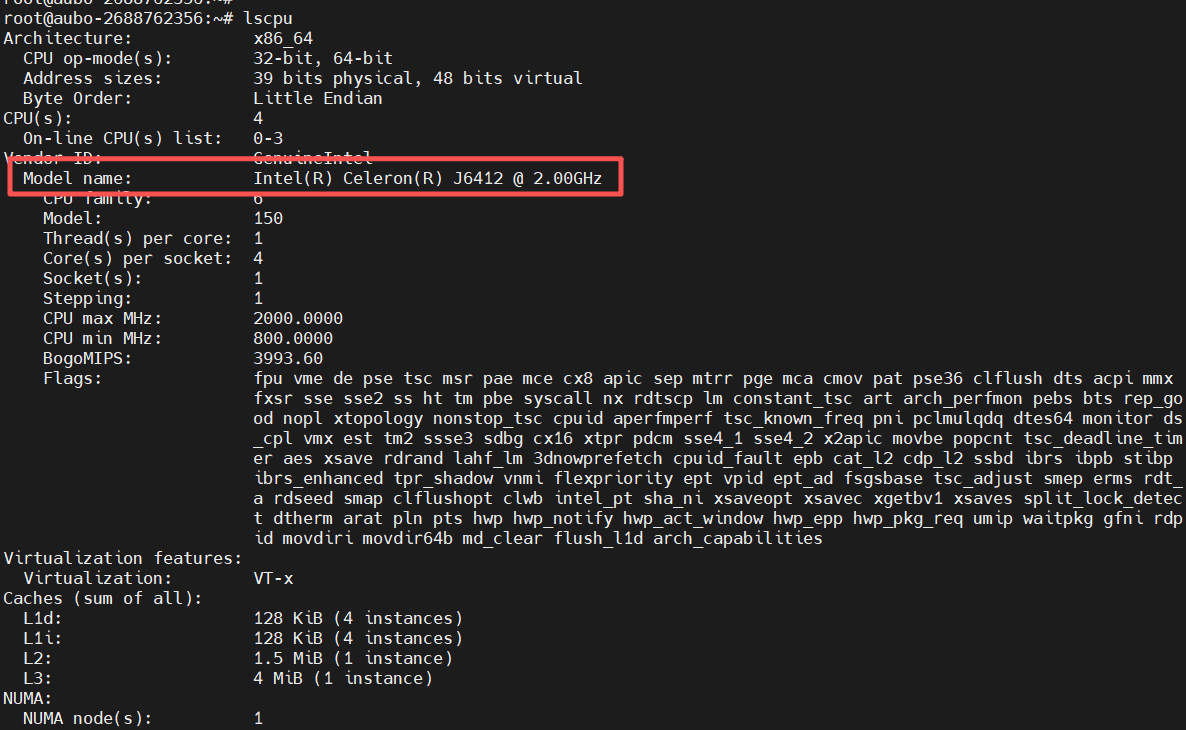
版本准备
- 更新至 0.32 分支最新稳定版本。(0.32.0-beta.5 或 0.32.1-alpha.72 及以后发布版本)
- 下载链接:https://download.aubo-robotics.cn/pre-release/arcs/
修改限制参数
机械臂上电,核对当前机械臂型号(包括子型号,例如 aubo_i10H_10)。
核对 aubo_i10H_10 笛卡尔空间参数、以及安全限制(若非当前型号,联系研发提供)
文件路径:/opt/arcs/0.32.0-beta.2/aubo_description/config/aubo_10H_10.conf 。
# aubo_i10H_10 笛卡尔空间参数 v_tool_limit = 4.6 a_tool_limit = 52.8 vrot_tool_limit = 8.0 arot_tool_limit = 15.5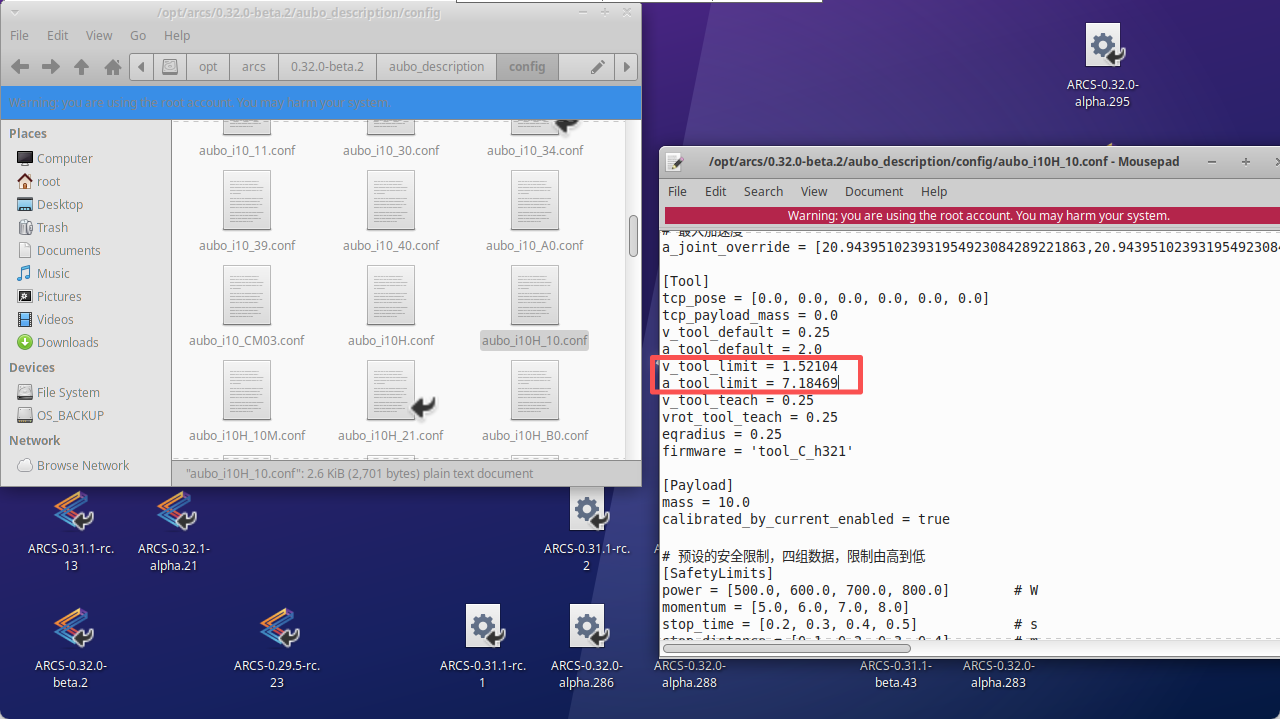
# aubo_i10H_10 安全限制参数 tool_speed = [0.25, 0.5, 1.0, 4.6] # m/s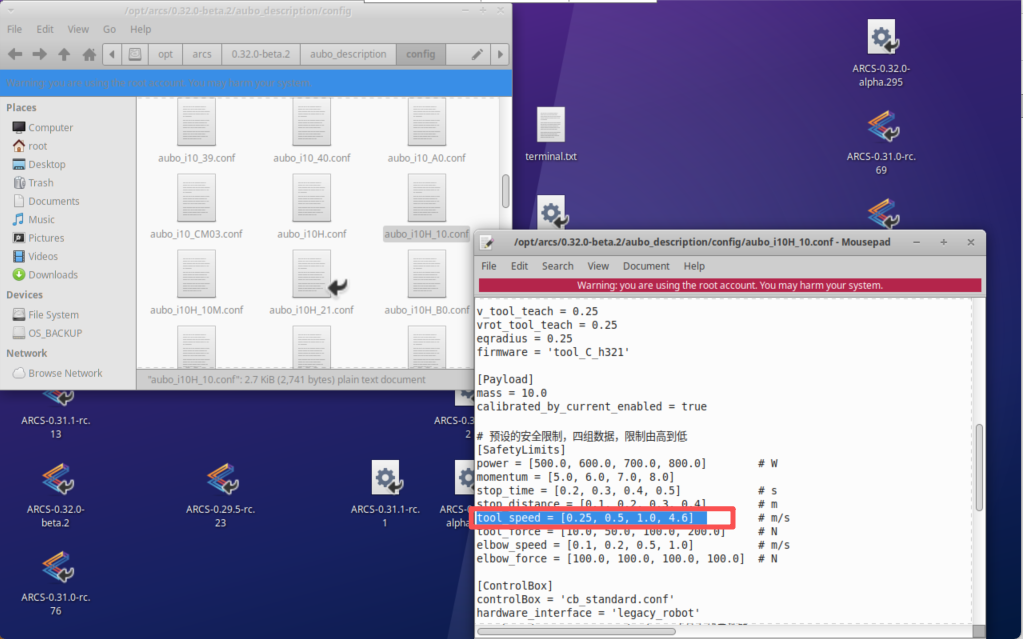
修改关节限制电流
上电松刹车查看各关节型号。
# 前往上电日志搜索 CANLITE_MODEL_TYPE,Joint1关节型号为 joint_M25H_h100 01/15/26 17:05:55.636244 [317233] INFO robot_driver1 - joint.c:392 Joint1 CANLITE_MODEL_TYPE: joint_M25H_h100(34)若关节型号为以下型号,需放大限制电流放大限制电流。
| 关节型号 | 限制电流值(A) | | --------- | --------------- | | M14H_h101 | 8 | | M20B_h402 | 20 | | M20_h402 | 20 | | M32H_h412 | 62 | | M32_h401 | 62 | | M32A_h401 | 62 |
cd /opt/arcs/xxxx/bin/ systemctl stop aubo_control killall aubo_control ./friction -i 1 -B 6000 # 将1关节电流修改为 6000mA 注意单位换算表格中为 A # 确认电流是否修改成功 搜索类似 Joint1 JOINT_LIT_MAX_CURRENT 0x02bc(7.000000)6个关节修改完成,查看伺服限制电流是否修改成功。
# 上电日志中搜索 JOINT_LIT_MAX_CURRENT 找到每个关节的数据并记录 01/23/26 12:09:22.831464 [1705] INFO robot_driver1 - joint.c:506 Joint4 JOINT_LIT_Limit_CURRENT 0x076c(19.000000)
机械臂新版阈值写入(重点)
按照新版阈值计算、写入流程,重新阈值;http://arcs.pages.aubo-robotics.cn:8001/arcs_wiki/09-collision_data_collect/
计算并写入完成,0.32 版本重新上电不再出现以下弹窗
碰撞阈值无效;或拷贝上电日志反馈给研发。
客户参考工程下载
三、测试流程
加载参考测试脚本。
开启加速度自适应功能,如图所示。

所有关节、直接运动修改为限制最大值。
运行观察是否存在机械臂抖动、异响情况;若存在此类情况,取相关日志数据联系研发同事处理。
处理问题后再次测试,若无问题或分析判断为正常现象,根据研发修改建议后继续长时间运行测试。
24小时长时间运行客户程序,不会发生关节碰撞等异常情况。
四、测试记录
| 测试项 | 预期结果 | 是否满足需求 |
|---|---|---|
| 版本校准 | 下载并更新 0.32 分支最新版本: 例如 0.32.0-beta.5 | |
| 阈值写入 | 校准新版本阈值,并成功写入底座 | |
| 稳定性测试 | 机械臂满载满速运行无抖动、异响情况 | |
| 长时间运行测试 | 运行24小时未出现误碰撞报警 |
五、 异常处理与记录
生产同事在重新校准加速度自适应适配的碰撞阈值或其他加速度自适应相关测试时,若存在非预期现象及时记录数据(日志压缩包),联系研发同事协助处理。