介绍
00 流程规范文件汇总
01 资源管理
02 虚拟机映像包更新规范
02-1 虚拟机映像包打包规范
03 Markdown 基本语法
04 文档编写说明
04-1 文档编写规范
04-2 文档图片规范
04-3 应用笔记与 Wiki 编写规范
04-4 应用笔记/Wiki-示例文档
04-5 应用手册编写规范
05 软件界面翻译说明
01 OEM 定制包使用指南
02 查看崩溃日志的方法
03 定制化机械臂及控制柜的类型显示
04 关节摩擦力参数辨识老化软件上位机说明
05 抓包流程
06 机械臂参数检查及写入流程
07 关节调试软件软件上位机说明
08 重新计算摩擦力参数说明
09 碰撞阈值测试数据采集方法
10 系统备份和还原操作流程
11 拖动碰撞导入流程
12 无线网卡说明
13 IS控制柜-老协议相关配置
14 拖动-碰撞测试流程
15 机器人诊断文档
16 机器人诊断数据分析
17 RS485测试流程
18 H7-TOOL离线烧录器使用SOP v1.0
19 Modbus RTU 串口通信测试
20 ARCS基础问题分析
21 控制柜RTLink_Canlite协议控制柜和关节生产导入
22 Linux 基础
23 机械臂控制柜指示和提示定义
24 U 盘写入性能测试指南
25 机械臂Leica标定测试说明书
26 配置文件编辑指南
27 分段功能配置教程及测试项步骤
28 ARCS服务管理
29 机械臂和控制柜老协议转新协议
30 重力补偿及碰撞软浮动功能测试方法
31 App 提示服务器断开连接问题排查
32 力矩常数手动调试方法
33 S系列双编机械臂修改最大限制电流操作指南
34 控制柜端口规定
35 坤维底座力传感器使用方法
36 奇异区域判定
37 电流拖动飘动原因及测试方法
38 补丁包制作流程
39 USB接口和UBUNTU系统性能测试
40 机器人型号确认流程
41 有线示教器界面卡死之后如何处理
42 CAN总线故障问题排查手册
43 故障状态调整机械臂姿态操作指南
44 TCP 球形包络使用指南
45 系统和网络实时性评估
46 增量编码器测试流程
47 刚度补偿测试验证说明
48 力控应用基础测试
49 CAN报文抓取步骤
50 RK3568处理器离线烧录操作指南
51 制作OEM包
52 开启音频
53 软EIP的配置安装流程
54 机器臂模型显示与实际不符排查方法
55 力控出厂测试
56 速度前馈测试
57 i系列机械臂减速器端编码器报警的处理方法
58 ARCS 软件和固件版本升级指南(补充)
59 CBSF传感器使用方法
60 双臂测试
61 一体化伺服电机解除刹车操作说明
62 运维系统安装说明
63 应用商店应用对接打包格式详情
64 误碰撞分析
65 双臂控制器系统镜像使用说明
66 docker交叉编译环境配置方法
67 机械臂关节多圈恢复操作
68 光编码器污染引起的飞车问题及解决办法
69 内存泄漏排查
70 工控机性能测试
71 ARCS界面型号与实际不符处理办法
72 编码器污染报错解决方案
73 传送带跟随使用说明(同步开关版)
74 如何在浏览器上使用AuboStudio App
75 焊接操作流程及经验分享
76 ARCS系统日志分析指导
77 用Leica激光跟踪仪进行DH参数标定及ISO测试的方法
78 力控装配工艺包接口文档
79 加速度自适应功能出厂测试方案
80 App 定制网站使用手册
81 Aubo ROS2 集成使用手册
82 G系列关节力矩传感器数据检查
83 软件授权与激活功能使用说明
84 G系列控制柜配置流程
85 IS系列机械臂上电异常烧板风险处理说明_老协议版本升级
86 外部轴配置与直线导轨联动使用说明
87 research control速度环使用说明
88 工艺魔方部署
89 关节设计超范围处理方法
本书使用 GitBook 发布
04 文档编写说明
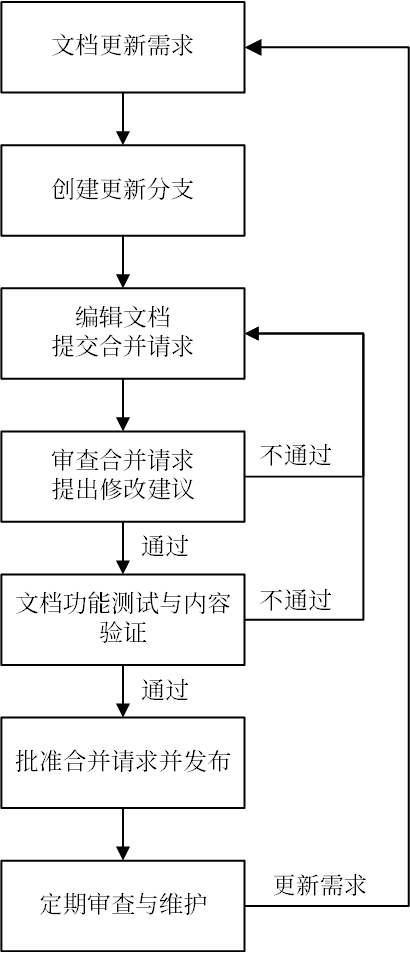
文档编写说明
文档维护流程
results matching "
"
No results matching "
"