六维力传感器快速配置指南
适用范围:本指导文档适用于外置六维力传感器的安装、配置、数据读取及故障排查。根据机械臂控制系统类型(AUBO PE 系统或 ARCS 系统)的不同,接入方式和配置方法存在差异,请根据实际系统类型选择对应部分进行配置。
一、ARCS 系统配置
1 ARCS 前期确认
在传感器安装前,需完成系统版本、硬件接口、传感器型号的确认,避免因兼容问题导致接入失败。
1.1 系统版本与协议确认
ARCS 系统原生支持 CANLite 协议力传感器,版本要求如下:
- ARCS 系统版本 ≥ v0.31.1
- 低于此版本请先升级 ARCS 系统
注意
ARCS 系统仅支持 CANLite 协议,不支持其他协议。
1.2 硬件接口确认
确认机械臂末端是否具备通信接口:
- 末端具备 RS485 接口:直接通过末端接口接入传感器;
- 末端无对应接口:需将 RS485 转为 USB,通过控制柜 USB 接口接入,后续需在软件中完成相应配置。
1.3 传感器型号确认
确认传感器型号为官方支持的型号。官方支持的传感器型号见:末端六维力传感器使用手册,在【支持的传感器型号】章节查询最新适配列表。
注意
若以上确认环节出现不兼容情况,建议联系官方售后,将硬件、软件、固件统一更新至最新版本。
2 ARCS 机械安装
检查机械臂末端、传感器表面是否存在损坏、异物附着,确保安装面平整无毛刺。
机械臂末端通常配置两个 IO 接口,其中四芯接口为末端 RS485 通信接口。传感器与机械臂末端完成连接后,需确认 RS485 转接头的固定螺丝拧紧到位、无松动,避免出现接触不良问题。
说明:
力传感器安装详细步骤请参考力控应用手册 - 力传感器安装。
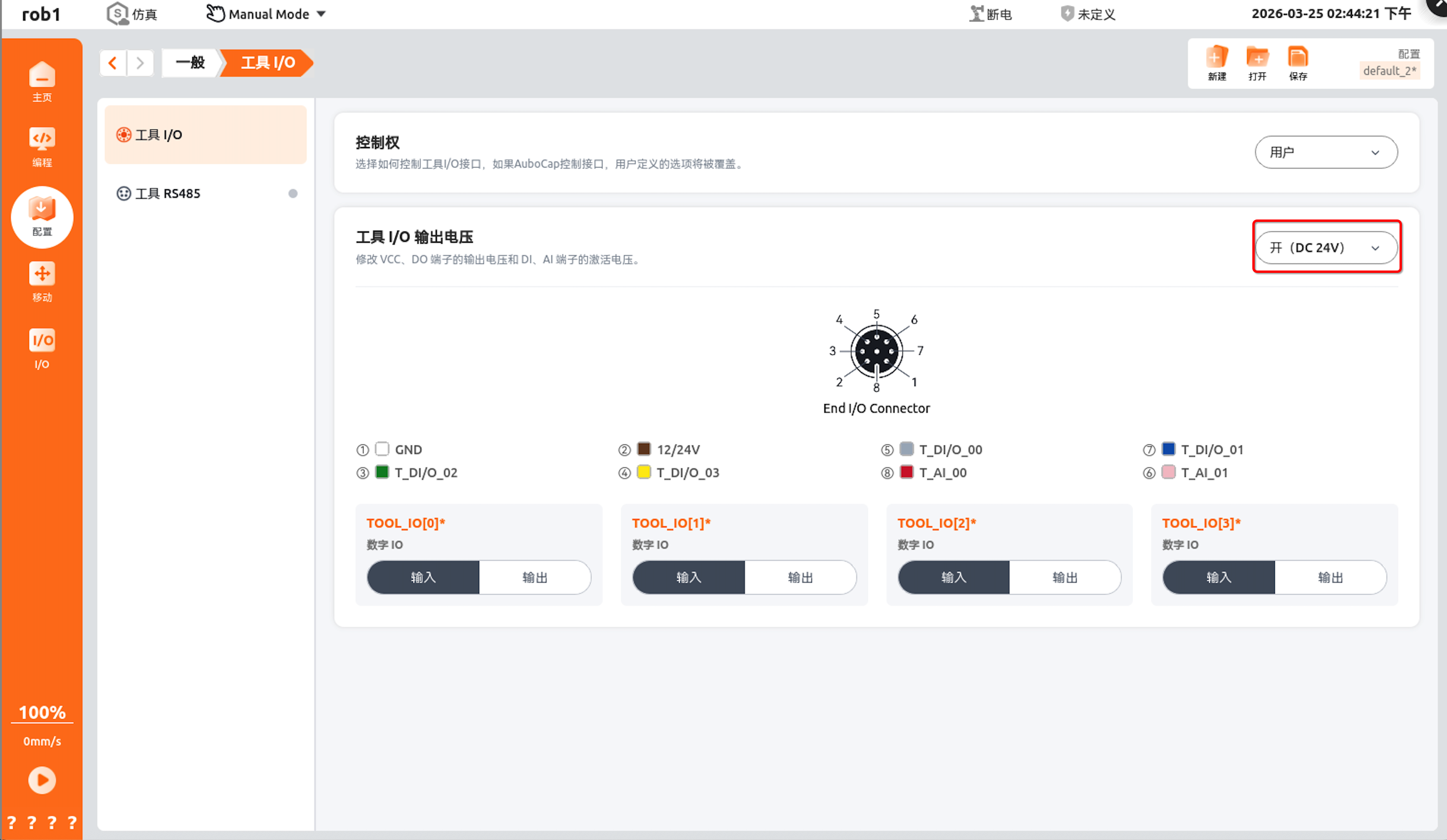
传感器供电:在工具 I/O 配置页中,将 VCC、DO 端子的输出电压设置为 DC24V:
3 API 函数说明
函数 1:arcs::common_interface::RobotConfig::selectTcpForceSensor
- 功能:初始化并选择力传感器型号
- 参数:name - 传感器型号字符串,此处 "KWTID60_300" 仅为示例。可以先用 getTcpForceSensorNames 接口获取所支持的全部传感器型号,选择匹配的型号给 name 赋值。
- 函数原型:int arcs::common_interface::RobotConfig::selectTcpForceSensor(const std::string & name)
- 调用示例:selectTcpForceSensor("KWTID60_300")(仅在程序初始时调用一次)
- Python 函数原型:selectTcpForceSensor(self: pyaubo_sdk.RobotConfig, arg0: str) -> int
- Lua 函数原型:selectTcpForceSensor(name: string) -> nil
函数 2:arcs::common_interface::RobotState::getTcpForceSensors
- 功能:读取传感器数据
- 函数原型:int arcs::common_interface::RobotState::getTcpForceSensors()
- Python 函数原型:getTcpForceSensors(self: pyaubo_sdk.RobotState) -> List[float]
- Lua 函数原型:getTcpForceSensors()-> table
4 ARCS 配置与使用流程
ARCS 系统原生支持 CANLite 协议力传感器,配置与使用流程如下:
- 确认 ARCS 系统版本 ≥ v0.31.1(如版本过低请先升级系统);
- 完成传感器机械安装;
- 在工具 I/O 配置页中完成 24V 供电配置,确认传感器通信正常(传感器在线);
- 调用初始化 API 选择传感器型号(详见"3 API 函数说明"章节);
- 完成传感器校准后即可使用。
部署与调试传感器步骤请参考末端六维力传感器使用手册。
5 力控功能文档汇总
二、AUBO PE 系统配置
1 AUBO PE 前期确认
在传感器安装前,需完成插件版本、硬件接口、传感器型号的确认,避免因兼容问题导致接入失败。
1.1 插件版本确认
AUBO PE 系统通过专属适配插件支持六维力传感器,版本要求如下:
- 最新插件版本 v2.0.12
- 低于此版本请安装官方最新版适配插件
注意
AUBO PE 系统不直接支持 CANLite 协议,必须通过官方适配插件来实现力传感器功能。
1.2 硬件接口确认
确认机械臂末端是否具备通信接口:
- 末端具备 RS485 接口:直接通过末端接口接入传感器;
- 末端无对应接口:需将 RS485 转为 USB,通过控制柜 USB 接口接入,后续需在软件中完成相应配置。
1.3 传感器型号确认
确认传感器型号为官方支持的型号。目前传感器类型支持坤维、宇力、鑫精诚、OnRobot、ATI 和 Wacoh 等传感器,通信方式支持 TCP 和 SerialPort 两种方式。
注意
若以上确认环节出现不兼容情况,建议联系官方售后,将硬件、软件、固件统一更新至最新版本。
2 AUBO PE 机械安装
- 检查机械臂末端、传感器表面是否存在损坏、异物附着,确保安装面平整无毛刺。
- 机械臂末端通常配置两个 IO 接口,其中四芯接口为末端 RS485 通信接口。传感器与机械臂末端完成连接后,需确认 RS485 转接头的固定螺丝拧紧到位、无松动,避免出现接触不良问题。
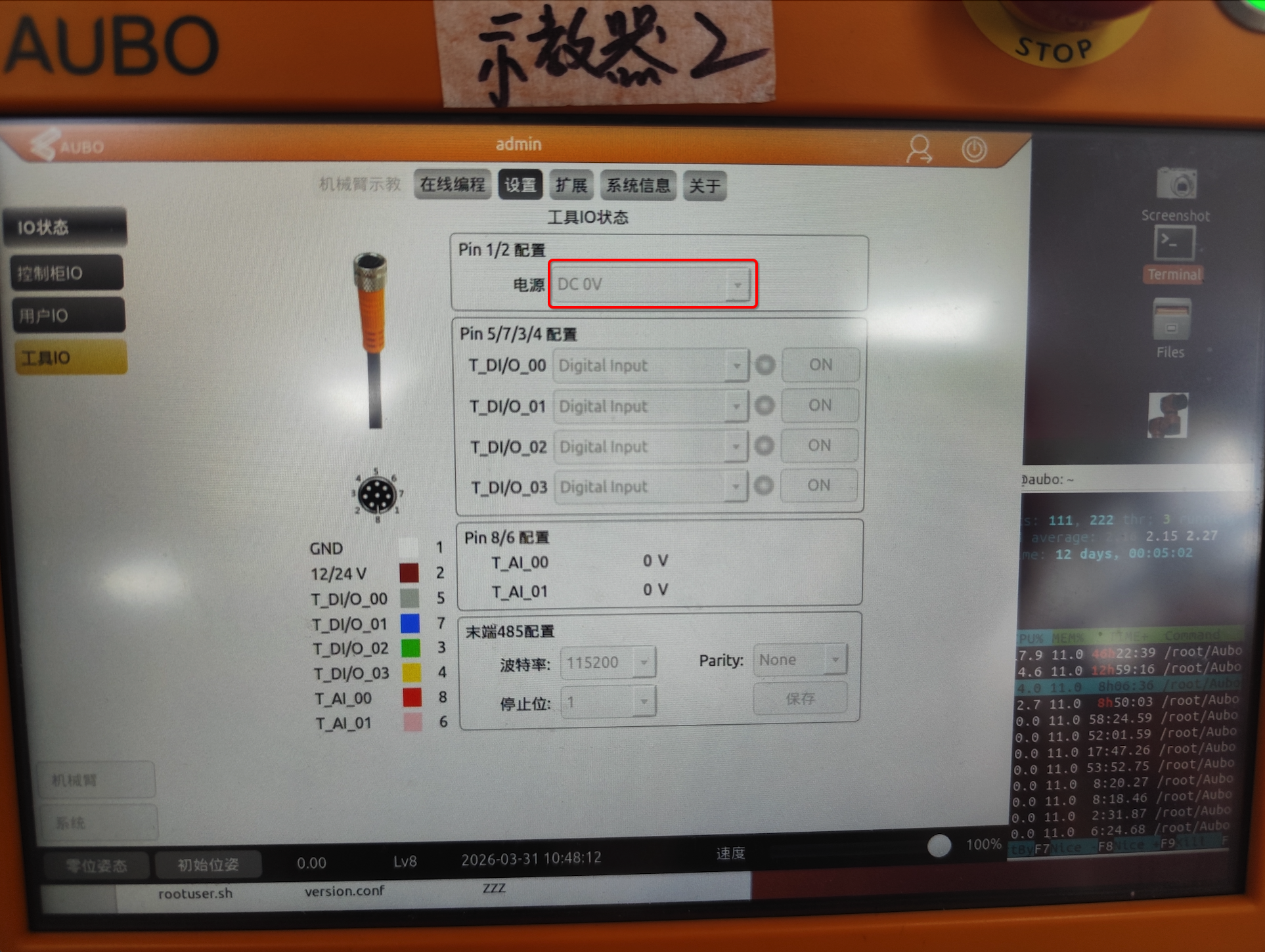
- 传感器供电:在工具 I/O 配置页中,将电源电压设置为 DC24V。需要注意末端 485 的波特率需要和传感器的波特率一致,各型号传感器的波特率见力传感器插件使用手册的附录章节。
3 AUBO PE 配置与使用流程
AUBO PE 系统通过专属适配插件支持六维力传感器,配置与使用流程如下:
- 安装六维力传感器专属适配插件(插件版本 ≥ v2.0.12,以官方最新版为准);
- 完成传感器机械安装;
- 在工具 I/O 配置页中完成 24V 供电配置,确认传感器通信正常(传感器在线);
- 在插件的注册界面选择传感器类型;
- 完成传感器校准后即可使用。
部署与调试传感器步骤请参考: 力传感器插件使用手册
三、故障排查指南
| 故障现象 | 可能原因 | 排查步骤与解决措施 |
|---|---|---|
| 通信失败,传感器离线,数据无更新 | 1. 24V 供电未接通或电压异常 2. RS-485 线序(A/B)接反 3. 通信线路断路 | 1. 检查 24V 电源指示灯(如有)或测量 V+ 与 GND 间电压 2. 交换 A、B 接线测试 3. 检查接线端子是否松动,线缆是否完好 |
| 数据漂移超出正常范围,零点不稳定 | 1. 环境温度变化过大,传感器未充分预热; 2. 存在安装应力,传感器固定不垂直; 3. 传感器未完成零点校准 | 1. 将传感器置于稳定温度环境,工作 30 分钟后再评估数据稳定性; 2. 重新安装传感器,确保同轴度,消除安装应力; 3. 在"配置" > "一般" > "工具I/O" 页面完成传感器零点校准。 |
| 力控功能无法开启(ARCS 系统) | 1. ARCS 系统版本过低,非原生支持版本; 2. 传感器非官方支持型号 | 1. 升级 ARCS 系统至 v0.31.1 及以上; 2. 确认传感器型号为官方支持列表,非支持型号更换适配型号 |
| 力控功能无法开启(AUBO PE 系统) | 1. 未安装适配插件/插件版本不兼容; 2. 传感器非官方支持型号 | 1. 安装官方最新版适配插件; 2. 确认传感器型号为官方支持列表,非支持型号更换适配型号 |
在传感器选型、安装、配置、使用过程中遇到无法解决的问题,建议联系售后寻求技术支持。联系售后时,同步提供系统版本、传感器型号、故障现象、接入方式等信息,便于快速定位问题。