力控插件使用手册
一. 力控插件简介
1.1 功能介绍
为兼容与适配所有力传感器,并使用力传感器实现 ARCS 系统下机械臂运行自适应和零力控制等功能,因此使用此力控插件。插件目前支持使用机械臂内置传感器、坤维、宇力和鑫精诚传感器。
1.2 插件部署介绍
1.2.1 传感器插件部署
使用力控插件需要 ARCS上位机版本为 0.29.2-beta.15 及以上,同时需要安装力控插件和配置相应参数,以上能通过插件部署压缩包进行一键部署,插件部署压缩包请向 AUBO 询问获取。将部署压缩包置于任意路径解压,使用终端到解压后的文件路径下,输入 sh install.sh 传感器类型命令执行安装脚本,即可完成力控插件和传感器插件的部署和配置文件的参数写入。
目前支持的传感器类型有:kw,xinjingcheng,yuli。
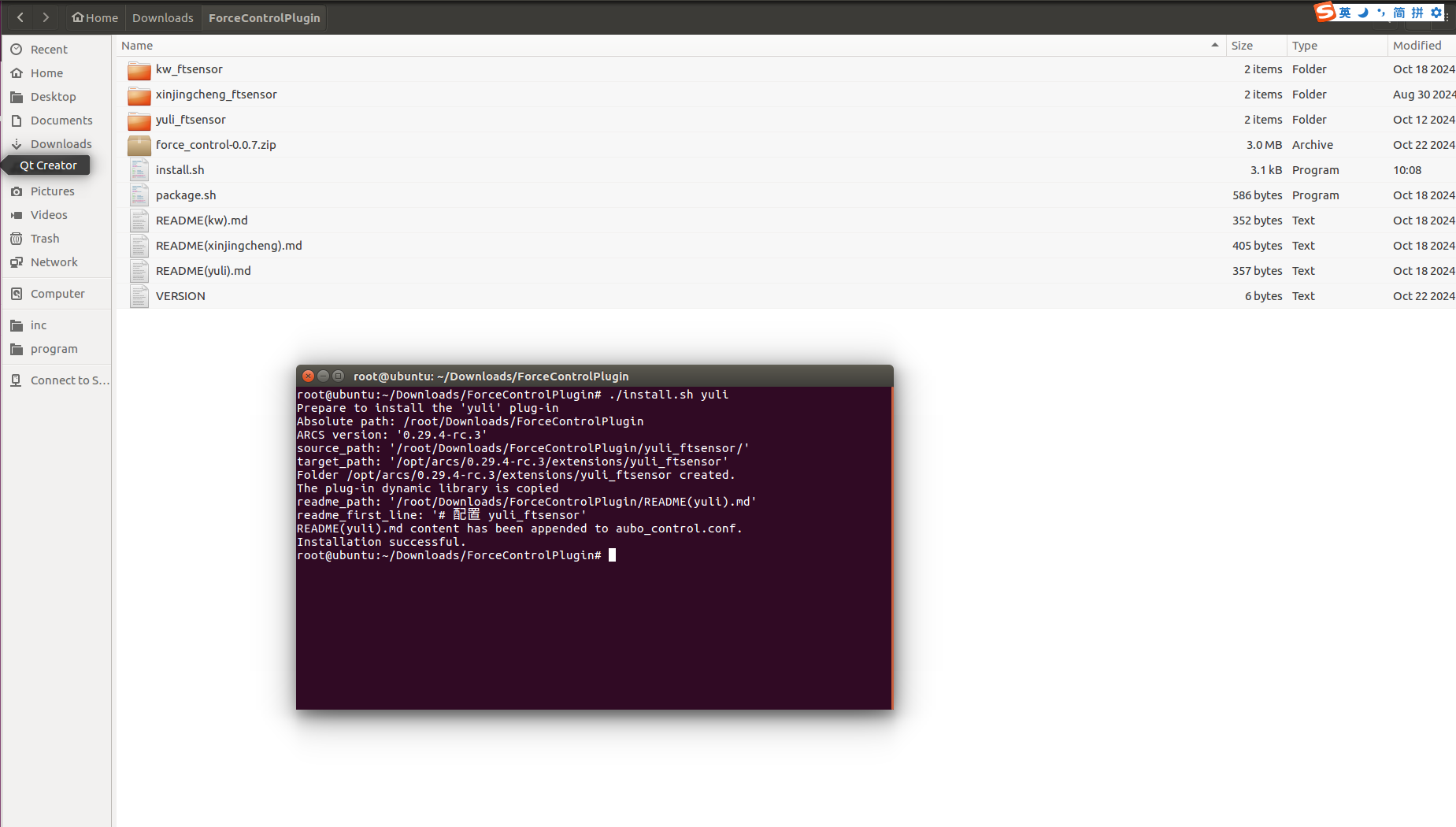
当看到图中的提示信息,即代表安装完成。
注意
首次切换到新的 ARCS 版本后需要重新部署。
1.2.2 力控插件部署
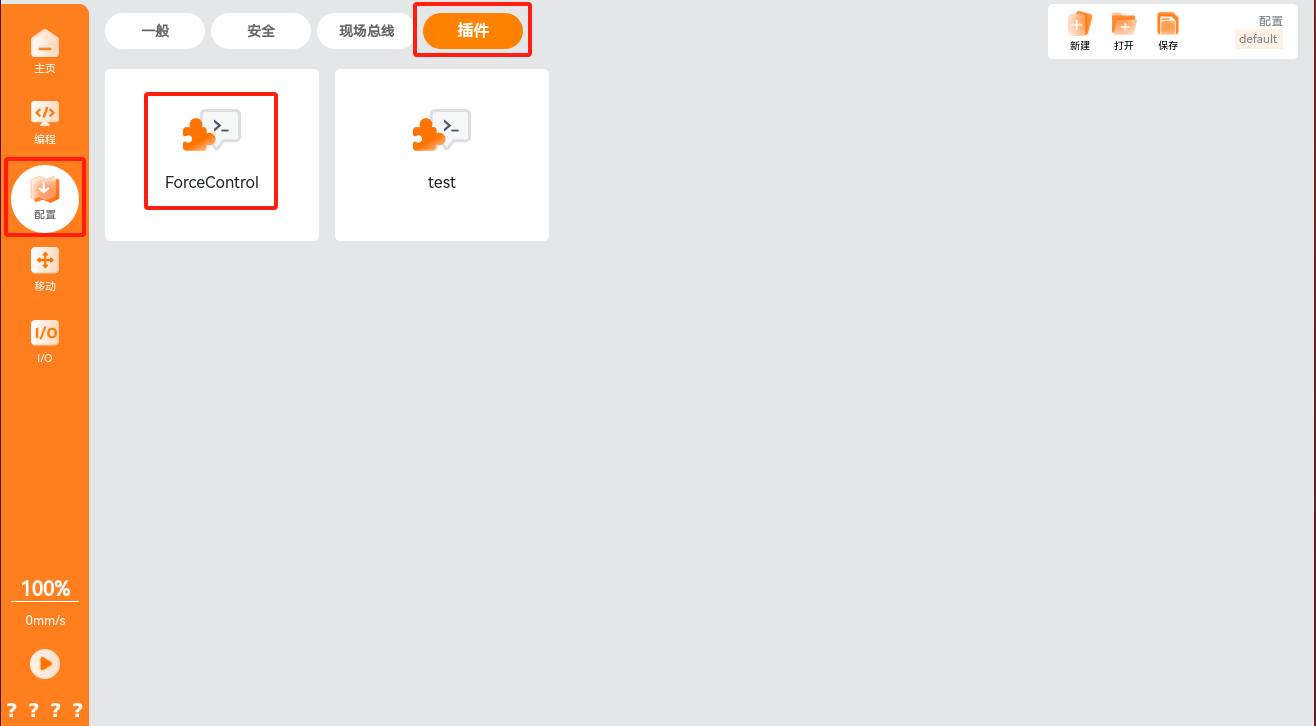
打开 ARCS 上位机,单击右上角“设置 > 系统 > 插件 > 新增”,选择对应版本的插件压缩包,单击【选择】进行添加。
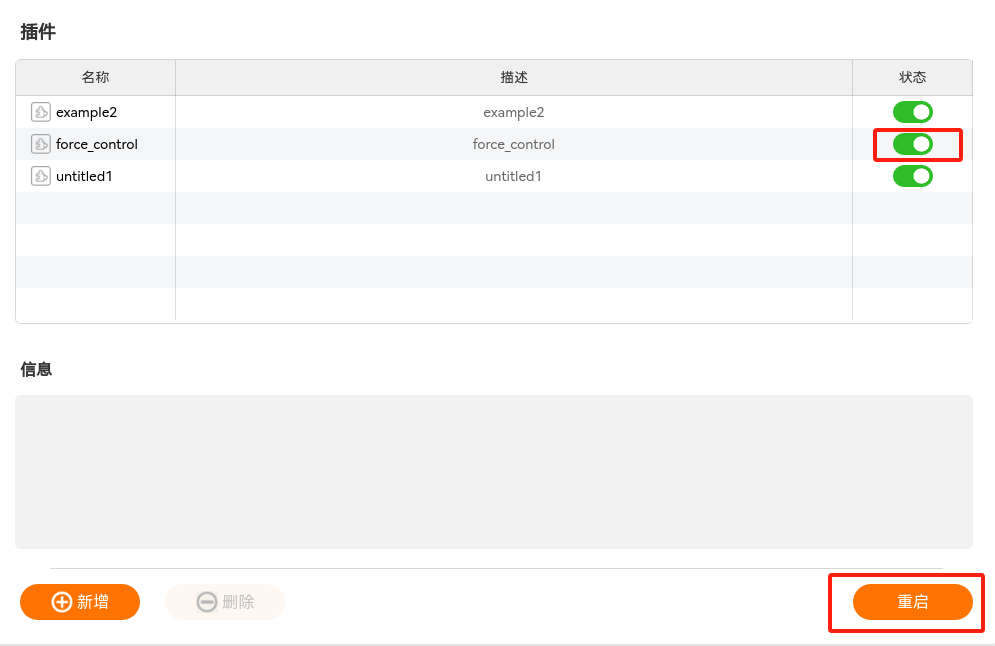
添加插件后,勾选力控插件,单击【重启】,即可完成插件的启用。
二. 插件操作界面介绍
2.1 传感器配置界面
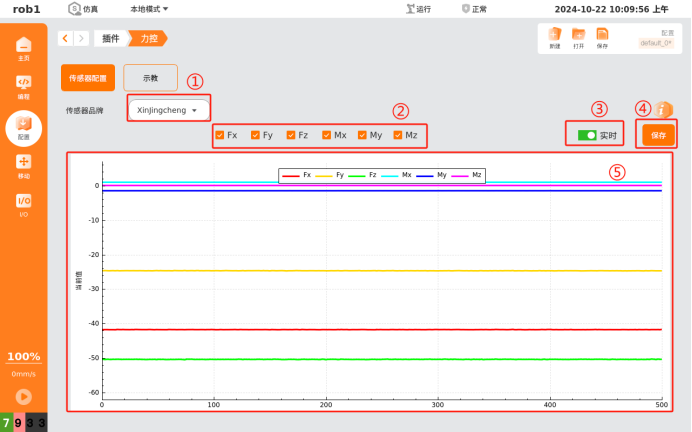
传感器配置界面如上图所示。
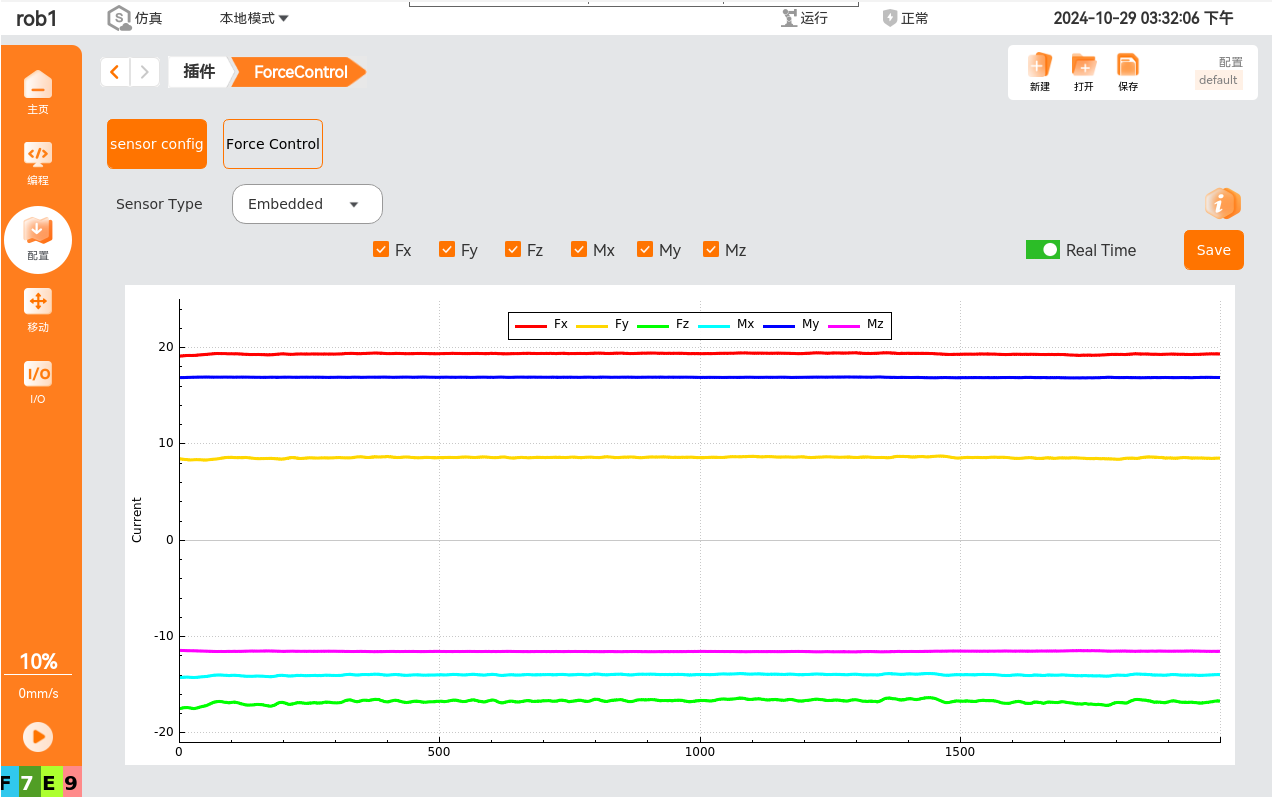
【传感器品牌】:用于选择使用的传感器品牌,目前支持内置传感器、坤维、宇力和鑫精诚传感器,选择完传感器之后,传感器就会立即请求数据。
可勾选复选框,来显示或隐藏相应数据。
【实时】:勾选【实时】,即可在下方图表处显示力数据。
【保存】:
在不勾选实时的情况下,单击【保存】,保存的数据为开始请求起的所有数据。
在勾选实时的情况下,单击【保存】,按钮状态变更为停止,此时开始保存数据,再次单击【停止】,停止保存,保存的数据为两次单击之间的数据。
文件保存在 /root/arcs_ws/extensions/force_control 目录下,文件中前六组数据为使用的 TCP 的位姿,后六组数据为 x、y、z 方向上的力和力矩大小。
注意
文件保存路径和图表显示长度支持修改,需要至
/root/arcs_ws/program/default.ins文件中进行修改,配置参数与上述步骤一致。图表实时显示除去偏置和负载的基于 Base 坐标系的力数据。支持显示 Fx、Fy、Fz、Mx、My、Mz 六组数据,分别表示 x、y、z 方向上的力和力矩大小。
以下介绍以鑫精诚传感器为例,其余传感器的使用类似。
2.2 示教界面
使用力控插件的相应功能前需要先在“配置>一般>工具中心点”处添加 TCP。单击【添加】,然后输入工具中心点相对于法兰中心的偏移值,并将此 TCP 设置为【默认】,如图所示。

然后进行传感器的标定,单击【标定】即可自动进行标定。
注意
在标定前务必保证传感器配置界面能正常读取力数据,且需要保证在标定过程中机械臂没有干涉,不会受到碰撞等影响。标定结束后,参数框会显示偏置、质量和质心数据,根据需要重新设置负载参数。
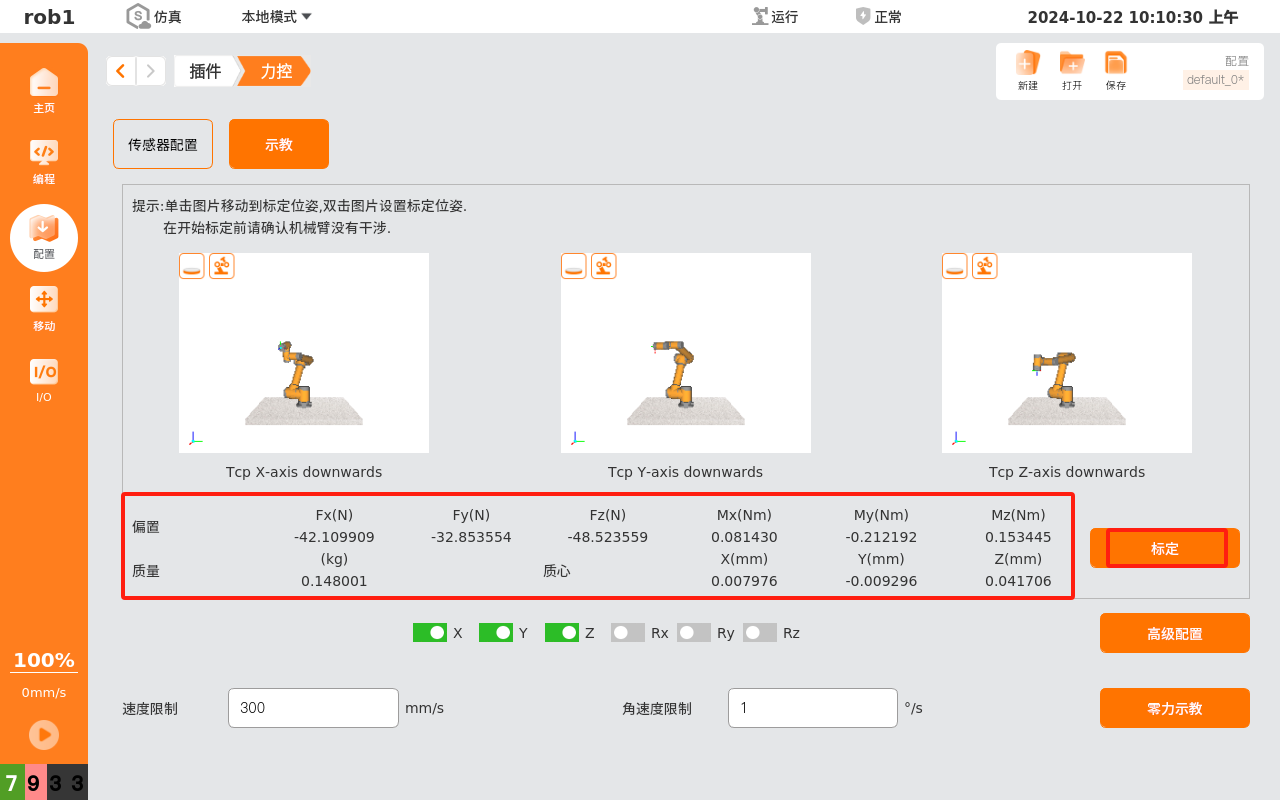
2.3 标定位姿界面
进行标定有三组默认的位姿,分别为 TCP 的 X 轴正方向朝下、TCP 的 Y 轴正方向朝下和 TCP 的 Z 轴正方向朝下,分别对应三组图片。
单击示教界面的三组图片,可移动至标定位姿界面。
双击示教界面的三组图片,可自行设置标定位姿,移动至想要的位姿,单击【确认】即可修改完成,自动保存。
三. 力控插件程序节点介绍
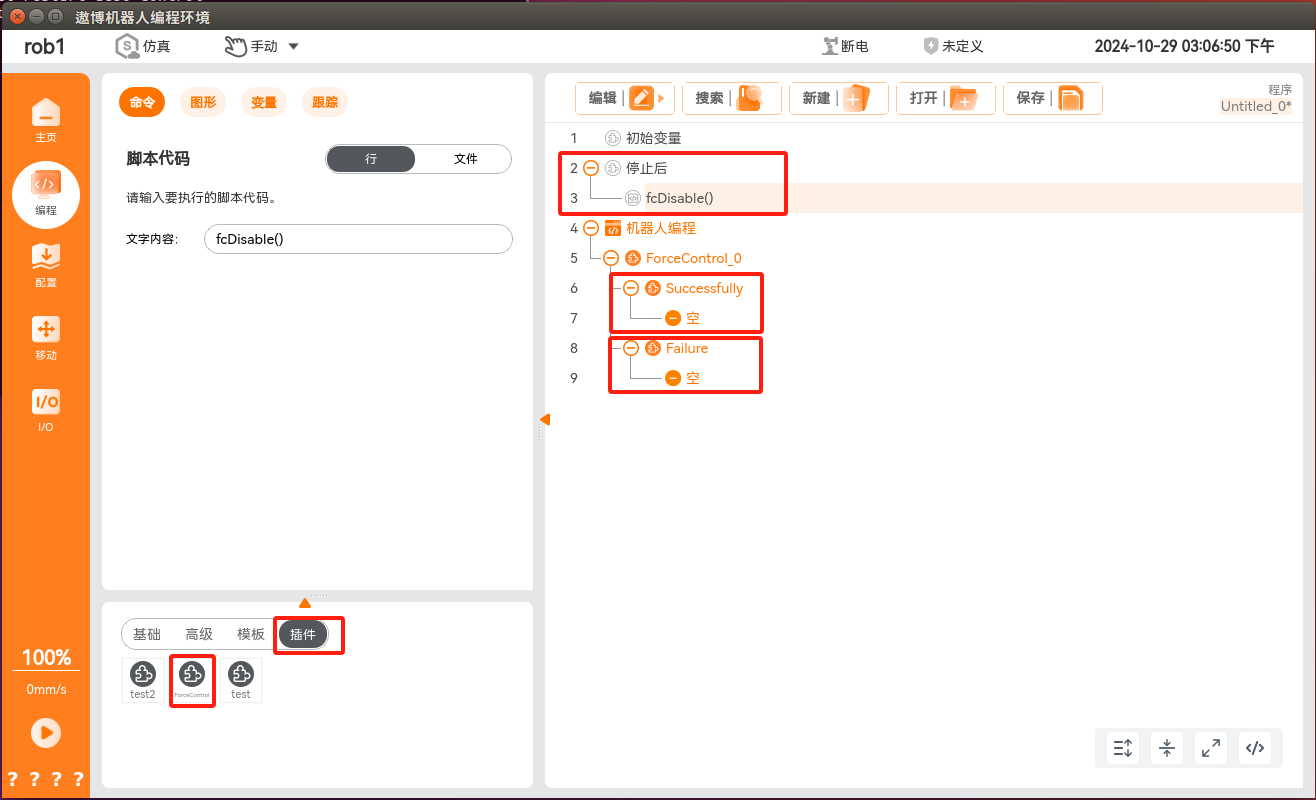
在程序节点中添加力控条件,单击“编程 > 插件 > ForceControl”,即可添加力控条件,此条件分为力控条件配置和正常/异常退出力控条件后的流程实现。
注意
正常/异常退出力控条件后都必须添加流程,程序停止后也应加入脚本 fcDisable(),避免异常退出后力控未关闭。
3.1 基础配置界面
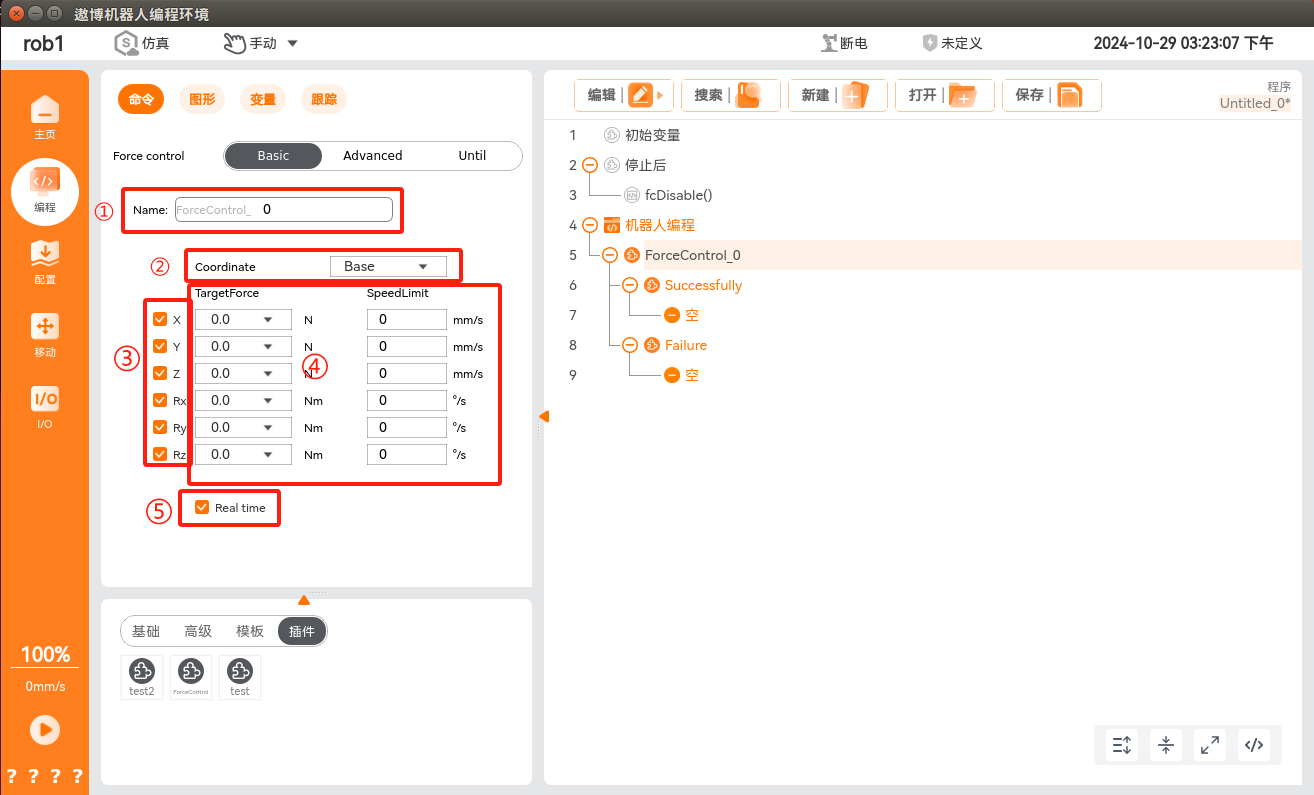
可自定义修改节点名称。
选择参考坐标系,一般选择用户坐标系或者工具坐标系作为参考坐标系。
力控开启方向,如果不需要该方向力,可取消勾选。
可设置目标力与对应速度限制。
在“配置 > 插件 > 力控 > 传感器”配置界面可以査看实时的力控数据,如下所示,参考坐标系为上图步骤 2 设置的坐标系。
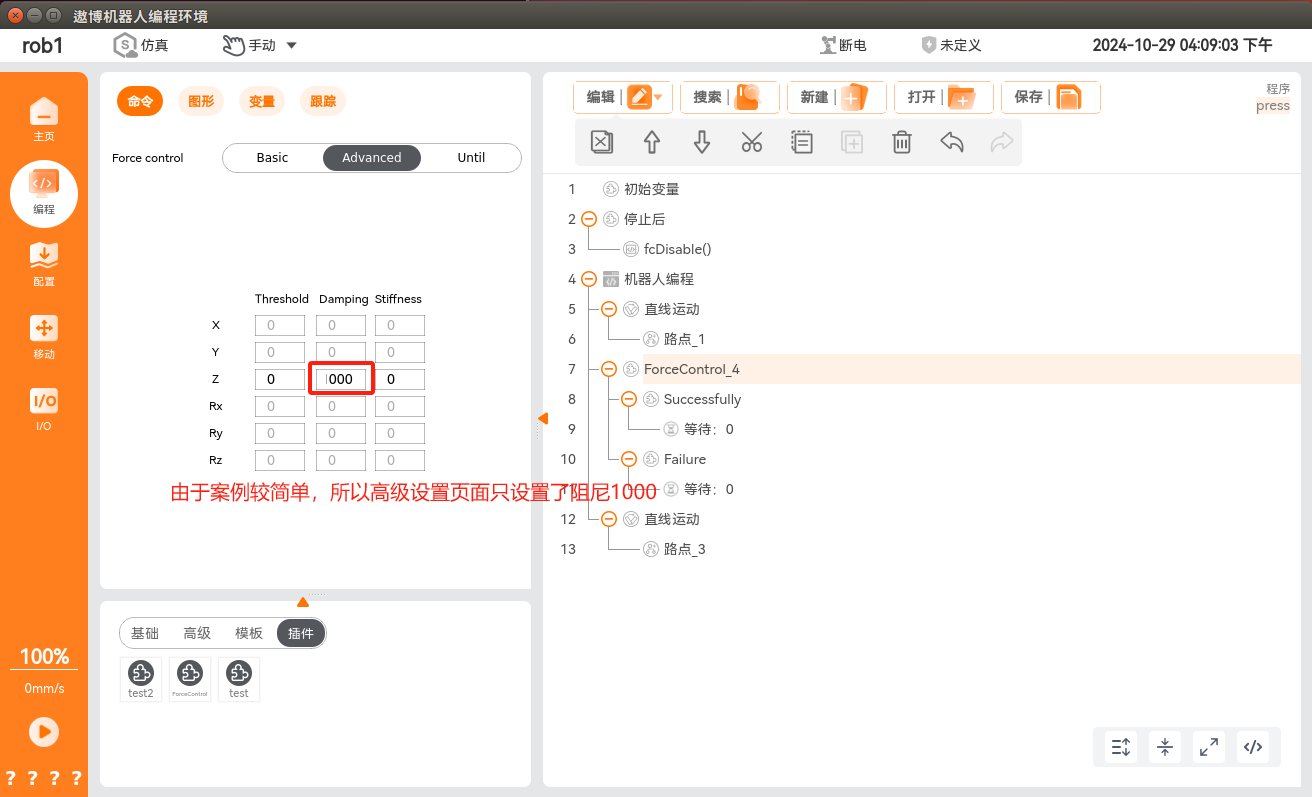
3.2 高级配置界面
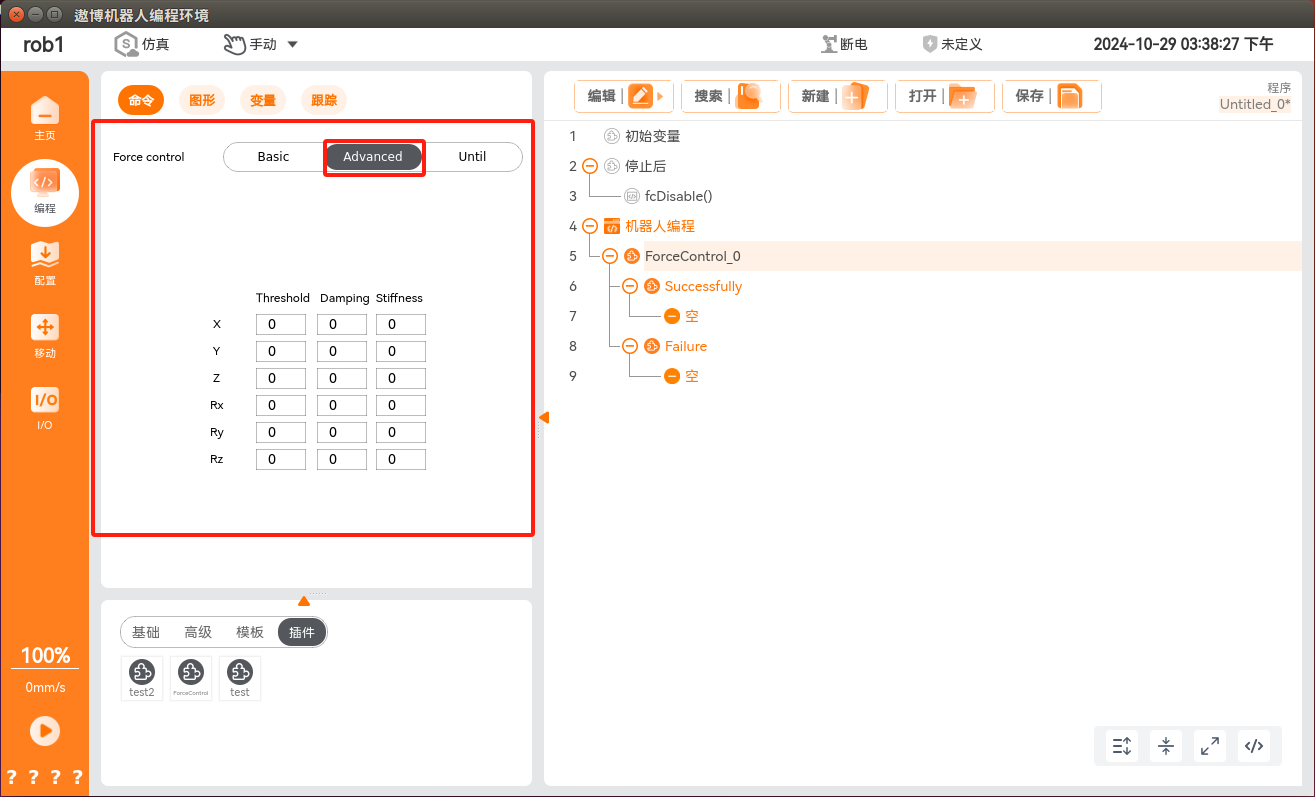
高级配置界面能对六个方向上的阈值、阻尼和刚度参数进行配置,某个方向的参数能否修改,取决于示教界面相应方向的复选框是否勾选。
阈值:在此界面修改暂无作用,需要到
/root/arcs_ws/config/aubo_control.conf文件中进行修改。阻尼:描述推动机器人有多少阻力。阻力不会随机器人与参考点的距离而增加,而通常随机器人的速度而增加。
刚度:描述机器人尝试返回参考点的力度。值越高,弹簧效果越强。将该值设置为零不会产生弹簧效应,并且机器人将沿所选方向浮动。
3.4 停止条件界面
停止条件界面分为正常退出条件和异常退出条件。
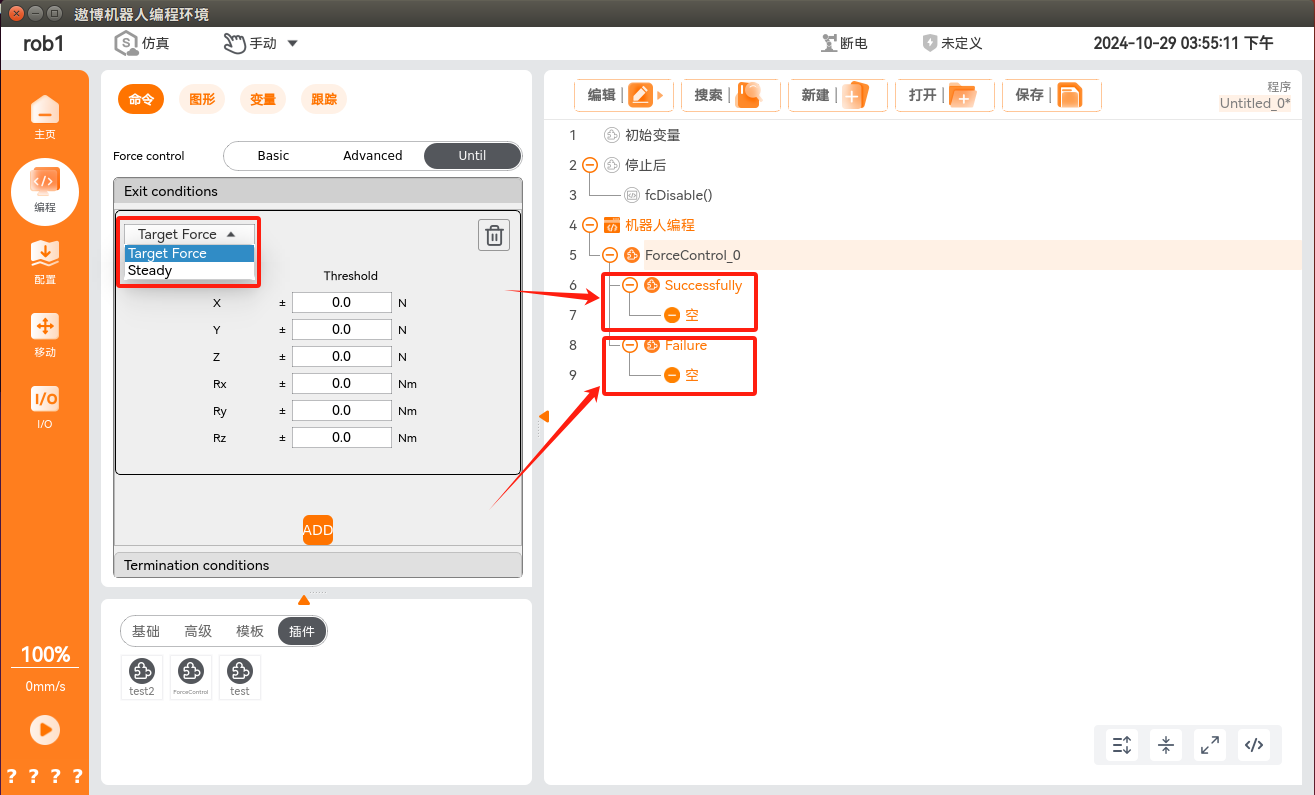
在正常退出条件中,可供选择的有目标力和稳态两种情况,满足条件即可退出力控条件,并进入力控正常退出流程。
选择目标力,即代表六个方向上满足目标力设置的阈值大小。
选择稳态,即代表机械臂运动队列为空,且保持相对静止。
在异常退出条件中,可供选择的有超时一种情况,满足条件即可退出力控条件,并进入力控异常退出流程。选择超时,即代表开启力控后间隔设置时间还未退出力控。
四. 实例
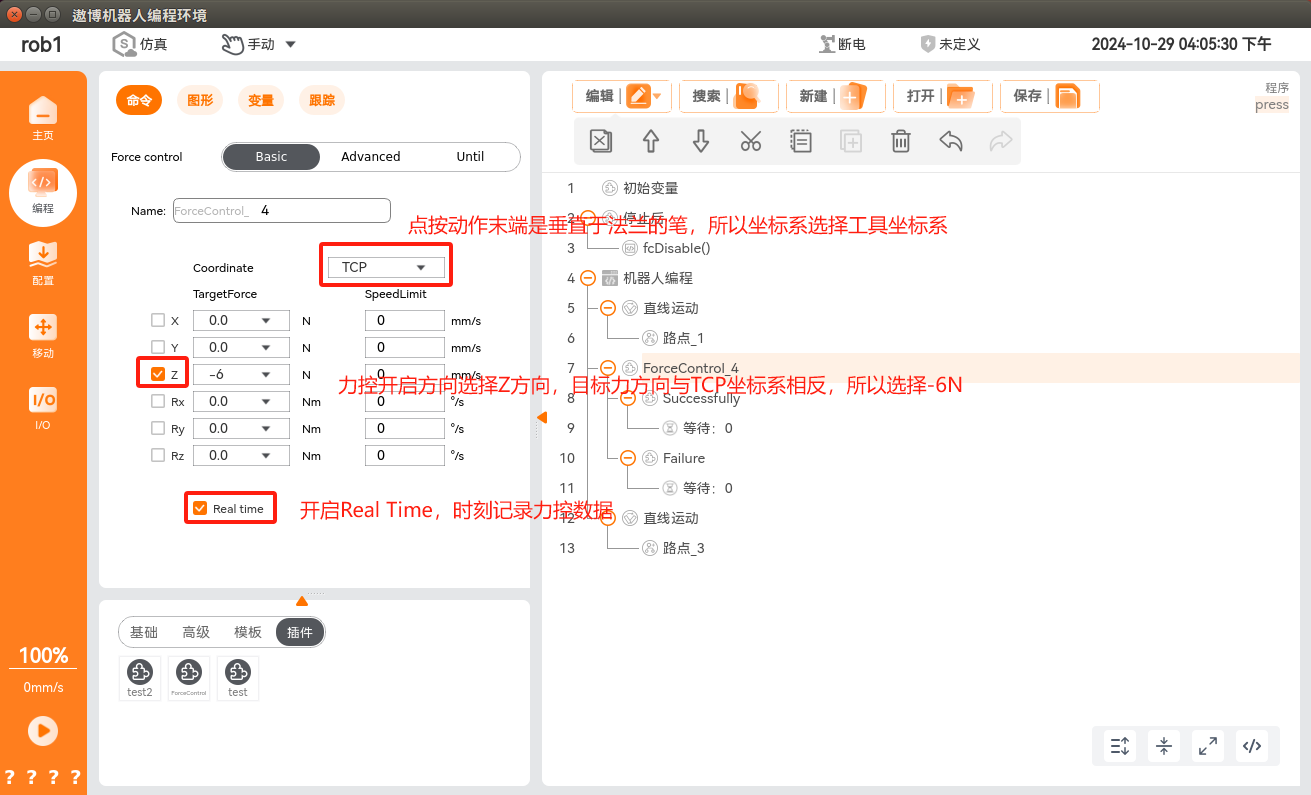
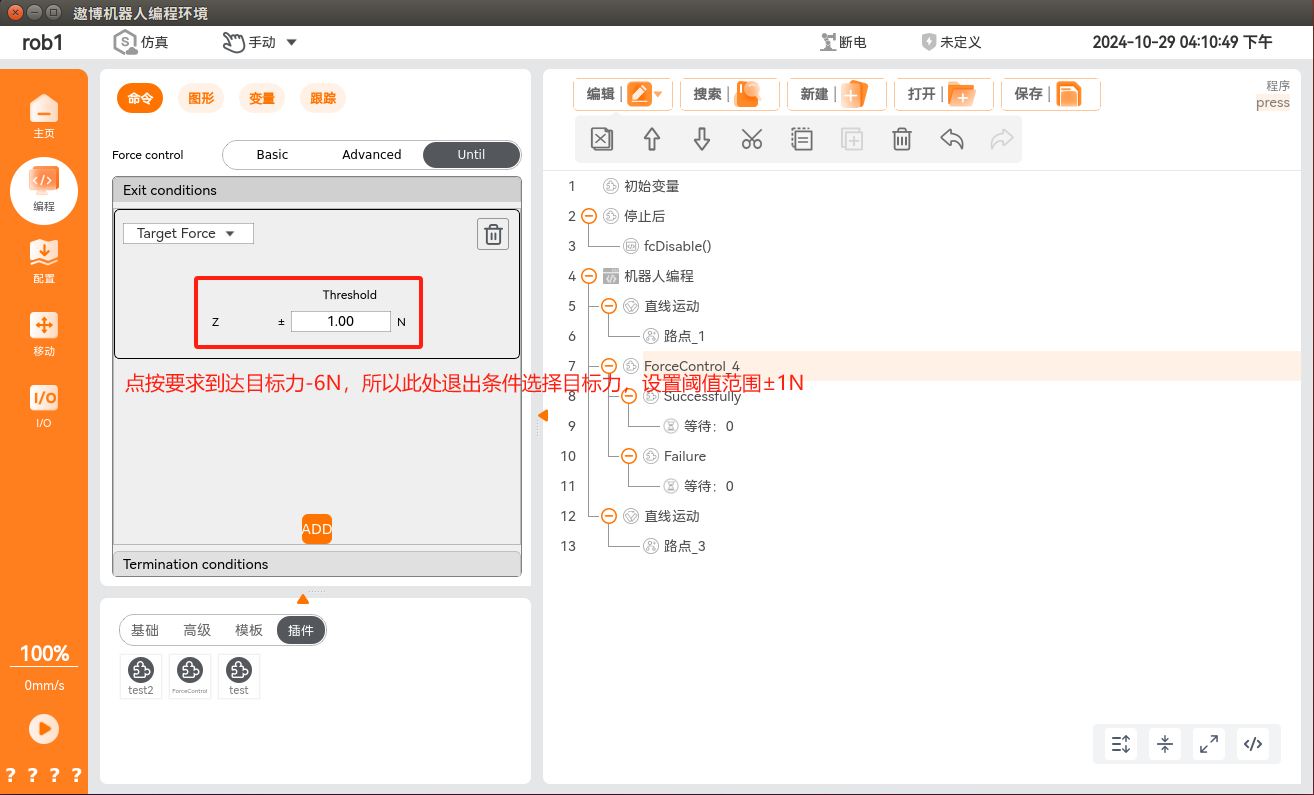
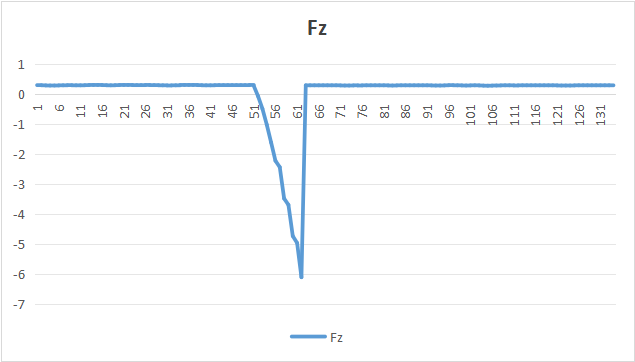
4.1 点按
要求:机械臂末端的笔以 6N ± 1N 的力垂直接触目标平面,接触后再回退。
思路:点按过程中力控阶段速度过快会导致目标力过冲,为避免这种情况且不降低节拍,选择在目标点上方 3mm 处开启力控,到达目标力后退出力控,力控阶段速度调低。其他阶段选择直线或者关节运动,速度可以根据实际情况设置。
机械臂点按执行示例:
点按实例相关文件:
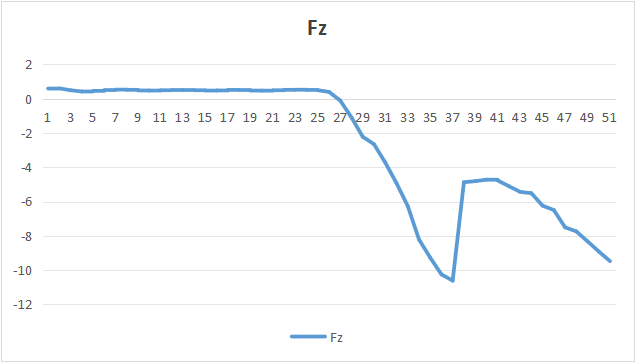
4.2 连按
要求:机械臂末端的笔以 10N ± 1N 的力垂直接触目标平面,抬起后再以 10N 的目标力按下,接触后在回退。
思路:过程类似点按,在点按的基础上再加上一段抬起与点按的过程。
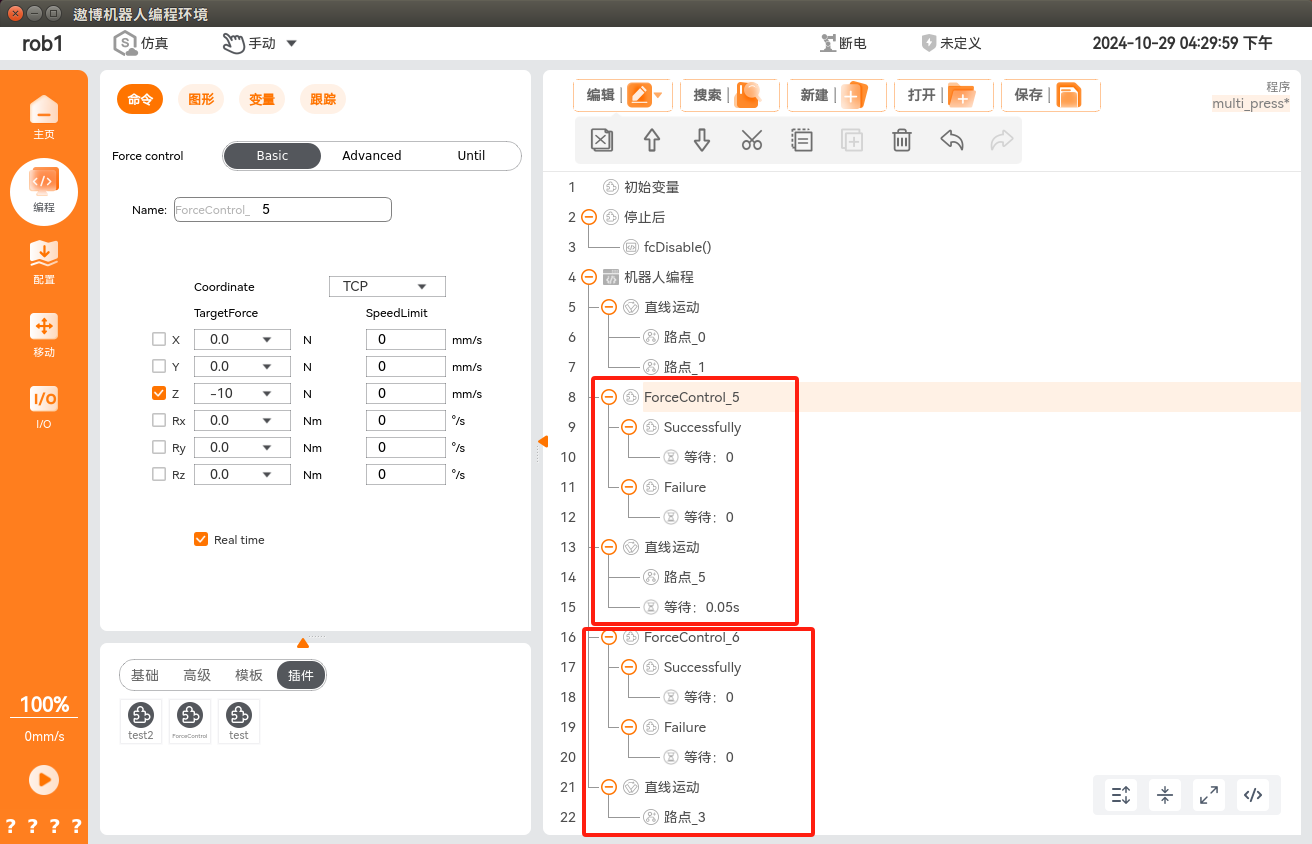
参数设置如下:
坐标系选择 TCP。
力控开启方向选择 Z。
目标力 -10N。
阻尼设置 1000,可根据现场实际情况进行修改。
退出条件为达到目标力 ±1N。
连按实例相关文件:
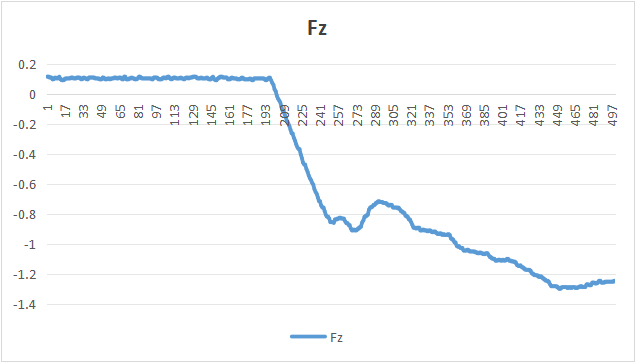
4.3 画直线
要求:机械臂末端的笔以 1N ± 0.5 的力垂直接触目标平面,在平面上以 1N ± 0.5N 的力绘制一条直线。
思路:第一段过程类似点按,在以 1N 的目标力接触平面后退出力控,设置平面上另一点开启力控,维持 1N 的力直线运动过去,也可将两段力控合成一段,到达目标力后直接绘制直线,过程中不关闭力控。
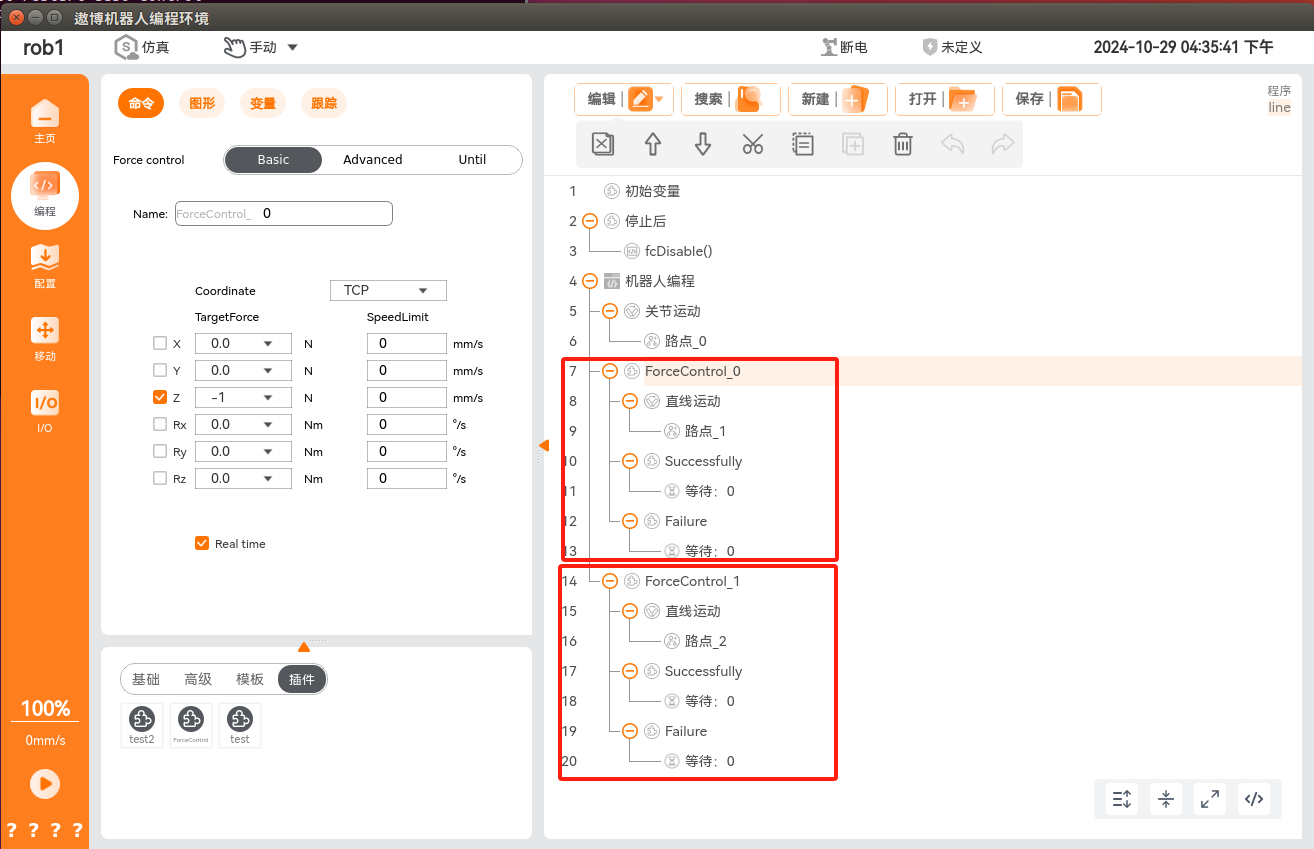
参数设置如下:
坐标系选择 TCP 。
力控开启方向选择 Z 。
目标力 -1N 。
阻尼设置 1000 ,可根据现场实际情况进行修改。
退出条件为第一阶段达到目标力 ±0.2N ,第二阶段稳态退出。
绘制直线实例相关文件:
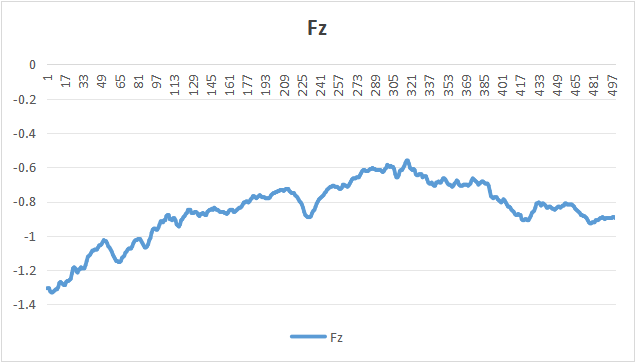
4.4 画圆
要求:机械臂末端的笔以 1N ± 0.5 的力垂直接触目标平面,在平面上以 1N ± 0.5N 的力绘制一个圆。
思路:第一段过程类似点按,在以 1N 的目标力接触平面后,开启第二段力控,标定圆的三个点,以 1N ± 0.5N 的目标力绘制一个圆。
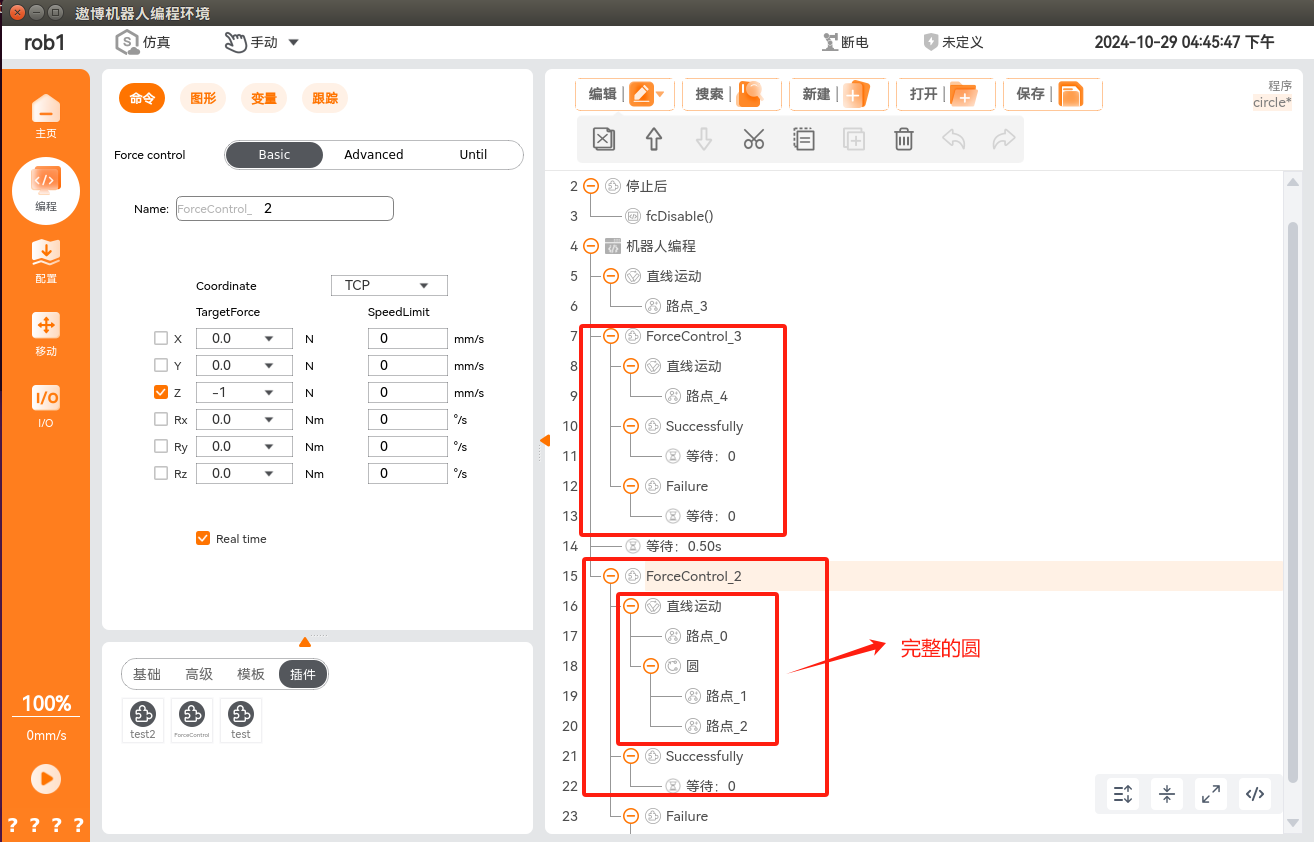
参数设置如下:
- 坐标系选择 TCP。
- 力控开启方向选择 Z。
- 目标力 -1N。
- 阻尼设置 1000,可根据现场实际情况进行修改。
- 退出条件为达到目标力 ± 0.2N。
机械臂画圆执行示例:
- 绘制圆实例相关文件:
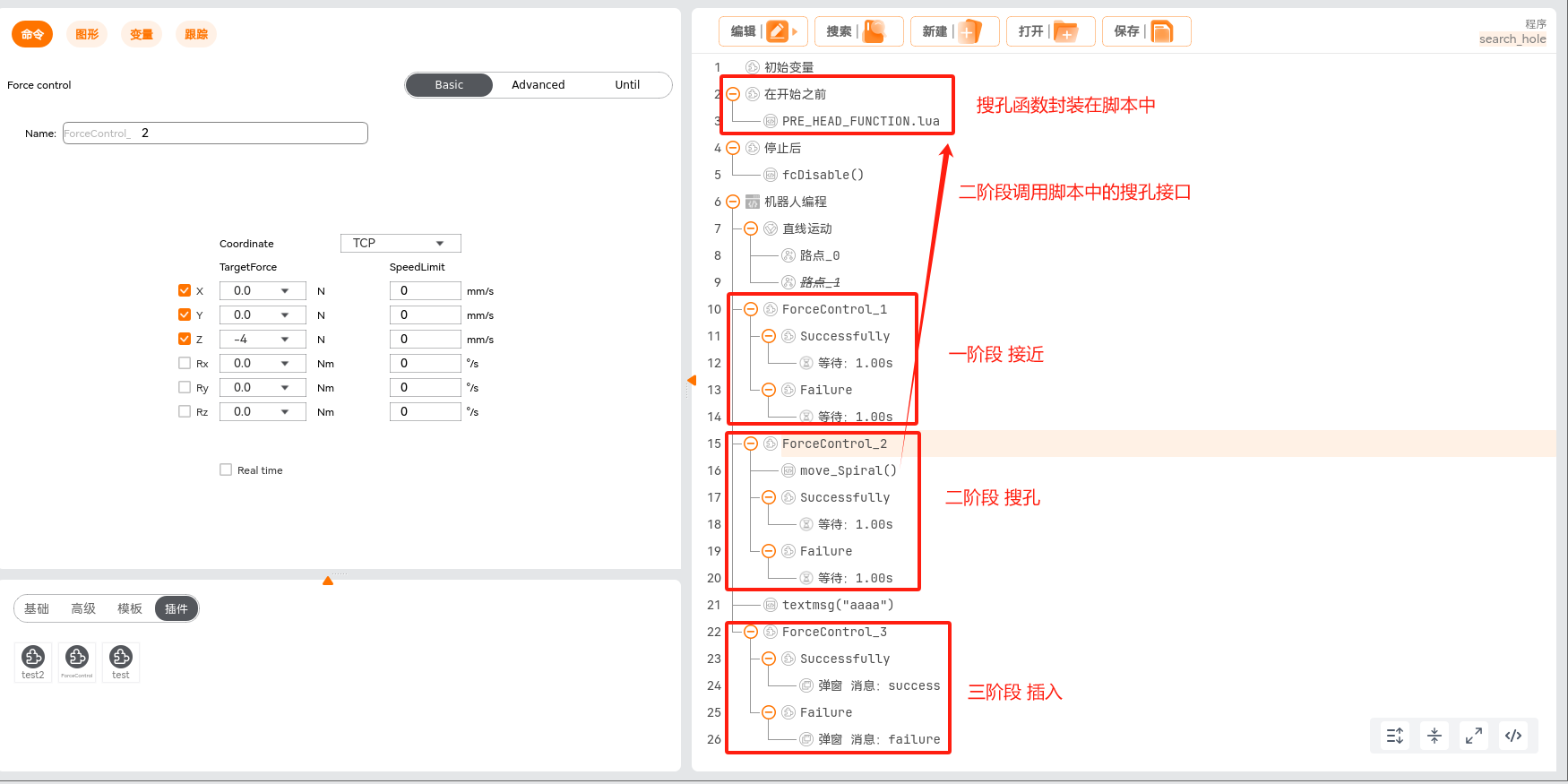
4.5 搜孔
要求:机械臂末端工件垂直接触目标孔洞,并对准孔洞完成插入。
思路:
第一段过程接近,类似点按,在以 1N 的目标力接触平面后停止力控。
第二段过程螺旋搜孔,以 4N 的目标力进行螺旋搜孔,当工件搜索到孔洞时,Z 方向目标力突变减小到 2N 以内,触发现阶段力控停止条件。
第三段过程是插入,设置 Z 方向目标力为6N,XY 方向目标力为 0,使工件能沿着孔洞插入进去。
参数配置:
- 第一阶段:接近:
- 坐标系选择 TCP。
- 力控开启方向选择 Z。
- 目标力 -2N。
- 阻尼设置 1000 ,可根据现场实际情况进行修改。
- 退出条件为达到目标力 ±0.2N。
- 第二阶段,螺旋搜孔:
- 坐标系选择 TCP。
- 力控开启方向选择 Z。
- 目标力 -4N。
- 阻尼设置 2000 ,可根据现场实际情况进行修改。
- 正常退出条件为维持稳态
- 异常退出条件为目标力,Z 方向 -2N~2N,勾选 outside。
- 第三阶段,插入 :
- 坐标系选择 TCP。
- 力控开启方向选择 XYZ。
- 目标力 XY 方向为 0 ,Z方向 -6N。
- 阻尼设置 1000,1000,2000,可根据现场实际情况进行修改 。
- 正常退出条件为维持稳态。
- 第一阶段:接近:
机械臂搜孔执行示例:

搜孔实例相关文件: