获取带DH补偿参数的URDF文件
1. 准备DH补偿文件
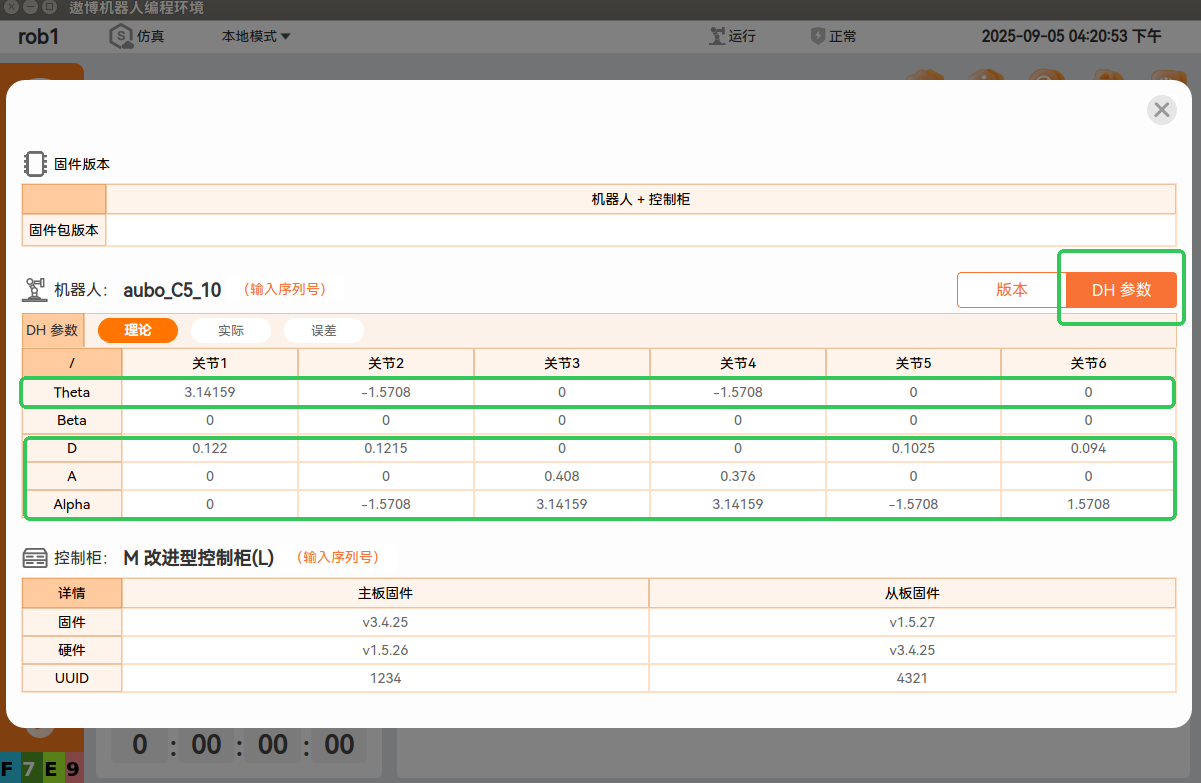
机器人上电后,将示教器软件界面的DH参数赋值到此文件:[dh_error_compensation.txt] , 将此文件和 [update_urdf_dh.py] 拷贝到可执行程序所在目录,例如: /opt/arcs/xxx/bin
2. 运行
cd /opt/arcs/xxx/bin
python3 ./update_urdf_dh.py --urdf_in ../aubo_description/urdf/aubo_S5.urdf --urdf_out ./aubo_S5_new.urdf --delta_file dh_error_compensation.txt在当前目录下得出结果和新文件:aubo_S5_new.urdf,例如:
Modified DH (from URDF, q=0):
shoulder_joint: a=0.000000000, alpha=0.000000000, d=0.170900000, theta0=3.141592654
upperArm_joint: a=0.000000000, alpha=-1.570796327, d=0.132110000, theta0=-1.570796327
foreArm_joint: a=0.425000000, alpha=-3.141592654, d=0.000000000, theta0=0.000000000
wrist1_joint: a=0.342300000, alpha=3.141592654, d=0.000000000, theta0=-1.570796327
wrist2_joint: a=0.000000000, alpha=-1.570796327, d=0.130000000, theta0=0.000000000
wrist3_joint: a=0.000000000, alpha=1.570796327, d=0.123700000, theta0=0.000000000
Modified DH (after deltas):
shoulder_joint: a=0.000000000, alpha=0.000000000, d=0.270900000, theta0=3.141592654
upperArm_joint: a=-0.000030000, alpha=-0.870796327, d=0.232110000, theta0=-1.570796327
foreArm_joint: a=0.425473000, alpha=-2.741592654, d=0.000000000, theta0=0.000000000
wrist1_joint: a=0.342063000, alpha=3.441592654, d=0.000000000, theta0=-1.570796327
wrist2_joint: a=-0.000173000, alpha=-1.070796327, d=0.230000000, theta0=0.000000000
wrist3_joint: a=-0.000103000, alpha=1.570796327, d=0.223700000, theta0=0.000000000
Saved updated URDF to: ./aubo_S5_new.urdf